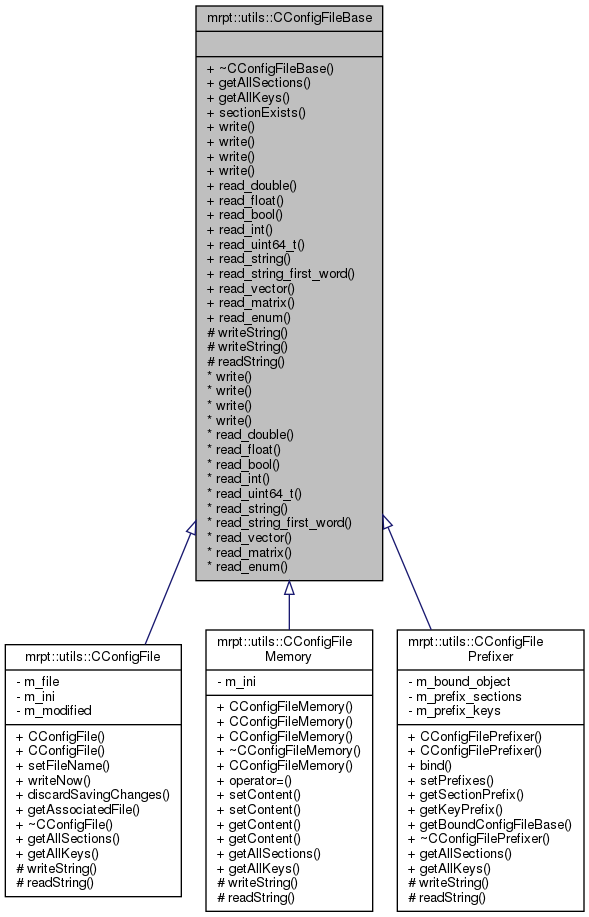
Detailed Description
This class allows loading and storing values and vectors of different types from a configuration text, which can be implemented as a ".ini" file, a memory-stored string, etc...
This is a virtual class, use only as a pointer to an implementation of one of the derived classes.
See: Configuration file format in MRPT
Definition at line 33 of file CConfigFileBase.h.
#include <mrpt/utils/CConfigFileBase.h>
Public Member Functions | |
| virtual | ~CConfigFileBase () |
| dtor More... | |
| virtual void | getAllSections (vector_string §ions) const =0 |
| Returns a list with all the section names. More... | |
| virtual void | getAllKeys (const std::string §ion, vector_string &keys) const =0 |
| Returs a list with all the keys into a section. More... | |
| bool | sectionExists (const std::string §ion_name) const |
| Checks if a given section exists (name is case insensitive) More... | |
Save a configuration parameter. Optionally pads with spaces up to the desired width in number of characters (-1: no fill), and add a final comment field at the end of the line (a "// " prefix is automatically inserted). | |
| template<typename data_t > | |
| void | write (const std::string §ion, const std::string &name, const data_t &value, const int name_padding_width=-1, const int value_padding_width=-1, const std::string &comment=std::string()) |
| template<typename data_t > | |
| void | write (const std::string §ion, const std::string &name, const std::vector< data_t > &value, const int name_padding_width=-1, const int value_padding_width=-1, const std::string &comment=std::string()) |
| void | write (const std::string §ion, const std::string &name, double value, const int name_padding_width=-1, const int value_padding_width=-1, const std::string &comment=std::string()) |
| void | write (const std::string §ion, const std::string &name, float value, const int name_padding_width=-1, const int value_padding_width=-1, const std::string &comment=std::string()) |
Read a configuration parameter, launching exception if key name is not found and <tt>failIfNotFound</tt>=true | |
| double | read_double (const std::string §ion, const std::string &name, double defaultValue, bool failIfNotFound=false) const |
| float | read_float (const std::string §ion, const std::string &name, float defaultValue, bool failIfNotFound=false) const |
| bool | read_bool (const std::string §ion, const std::string &name, bool defaultValue, bool failIfNotFound=false) const |
| int | read_int (const std::string §ion, const std::string &name, int defaultValue, bool failIfNotFound=false) const |
| uint64_t | read_uint64_t (const std::string §ion, const std::string &name, uint64_t defaultValue, bool failIfNotFound=false) const |
| std::string | read_string (const std::string §ion, const std::string &name, const std::string &defaultValue, bool failIfNotFound=false) const |
| std::string | read_string_first_word (const std::string §ion, const std::string &name, const std::string &defaultValue, bool failIfNotFound=false) const |
| Reads a configuration parameter of type "string", and keeps only the first word (this can be used to eliminate possible comments at the end of the line) More... | |
| template<class VECTOR_TYPE > | |
| void | read_vector (const std::string §ion, const std::string &name, const VECTOR_TYPE &defaultValue, VECTOR_TYPE &outValues, bool failIfNotFound=false) const |
| Reads a configuration parameter of type vector, stored in the file as a string: "[v1 v2 v3 ... ]", where spaces could also be commas. More... | |
| template<class MATRIX_TYPE > | |
| void | read_matrix (const std::string §ion, const std::string &name, MATRIX_TYPE &outMatrix, const MATRIX_TYPE &defaultMatrix=MATRIX_TYPE(), bool failIfNotFound=false) const |
| Reads a configuration parameter as a matrix written in a matlab-like format - for example: "[2 3 4 ; 7 8 9]". More... | |
| template<typename ENUMTYPE > | |
| ENUMTYPE | read_enum (const std::string §ion, const std::string &name, const ENUMTYPE &defaultValue, bool failIfNotFound=false) const |
| Reads an "enum" value, where the value in the config file can be either a numerical value or the symbolic name, for example: In the code: More... | |
Protected Member Functions | |
| virtual void | writeString (const std::string §ion, const std::string &name, const std::string &str)=0 |
| A virtual method to write a generic string. More... | |
| void | writeString (const std::string §ion, const std::string &name, const std::string &str, const int name_padding_width, const int value_padding_width, const std::string &comment) |
| Write a generic string with optional padding and a comment field ("// ...") at the end of the line. More... | |
| virtual std::string | readString (const std::string §ion, const std::string &name, const std::string &defaultStr, bool failIfNotFound=false) const =0 |
| A virtual method to read a generic string. More... | |
Friends | |
| class | CConfigFilePrefixer |
Constructor & Destructor Documentation
◆ ~CConfigFileBase()
|
virtual |
dtor
Definition at line 23 of file CConfigFileBase.cpp.
Member Function Documentation
◆ getAllKeys()
|
pure virtual |
Returs a list with all the keys into a section.
Implemented in mrpt::utils::CConfigFilePrefixer, mrpt::utils::CConfigFileMemory, and mrpt::utils::CConfigFile.
Referenced by mrpt::utils::CConfigFilePrefixer::getAllKeys().
◆ getAllSections()
|
pure virtual |
Returns a list with all the section names.
Implemented in mrpt::utils::CConfigFilePrefixer, mrpt::utils::CConfigFileMemory, and mrpt::utils::CConfigFile.
Referenced by mrpt::utils::CConfigFilePrefixer::getAllSections().
◆ read_bool()
| bool CConfigFileBase::read_bool | ( | const std::string & | section, |
| const std::string & | name, | ||
| bool | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Definition at line 99 of file CConfigFileBase.cpp.
References mrpt::system::lowerCase(), and mrpt::system::trim().
Referenced by mrpt::detectors::CFaceDetection::init(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::internal_loadFromConfigFile_common(), mrpt::pbmap::config_heuristics::load_params(), mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams(), mrpt::hwdrivers::CCameraSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CCANBusReader::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGPSInterface::loadConfig_sensorSpecific(), mrpt::hwdrivers::CHokuyoURG::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUIntersense::loadConfig_sensorSpecific(), mrpt::hwdrivers::CPhidgetInterfaceKitProximitySensors::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserSerial::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSkeletonTracker::loadConfig_sensorSpecific(), mrpt::hwdrivers::CKinect::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2_RGBD360::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2Sensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), mrpt::maps::CRandomFieldGridMap3D::TInsertionOptions::loadFromConfigFile(), mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::loadFromConfigFile(), mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TInsertionOptions::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TLikelihoodOptions::loadFromConfigFile(), mrpt::vision::TMatchingOptions::loadFromConfigFile(), mrpt::vision::TMultiResDescOptions::loadFromConfigFile(), mrpt::hwdrivers::TCaptureOptions_DUO3D::loadOptionsFrom(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::loadOptionsFrom(), readConfigFile(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), mrpt::gui::CPanelCameraSelection::readConfigIntoVideoSourcePanel(), and run_test_pf_localization().
◆ read_double()
| double CConfigFileBase::read_double | ( | const std::string & | section, |
| const std::string & | name, | ||
| double | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Definition at line 65 of file CConfigFileBase.cpp.
Referenced by mrpt::detectors::CCascadeClassifierDetection::init(), mrpt::detectors::CFaceDetection::init(), mrpt::nav::PlannerTPS_VirtualBase::internal_loadConfig_PTG(), mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::CCameraSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGPSInterface::loadConfig_sensorSpecific(), mrpt::maps::CRandomFieldGridMap3D::TInsertionOptions::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TLikelihoodOptions::loadFromConfigFile(), mrpt::vision::TMultiResDescOptions::loadFromConfigFile(), mrpt::utils::TCamera::loadFromConfigFile(), mrpt::nav::CPTG_RobotShape_Polygonal::loadShapeFromConfigFile(), mrpt::topography::path_from_rtk_gps(), and TEST().
◆ read_enum()
|
inline |
Reads an "enum" value, where the value in the config file can be either a numerical value or the symbolic name, for example: In the code:
In the config file:
Which can be loaded with:
- Note
- For an enum type to work with this template it is required that it defines a specialization of mrpt::utils::TEnumType
Definition at line 163 of file CConfigFileBase.h.
References MRPT_END, MRPT_START, mrpt::utils::TEnumType< ENUMTYPE >::name2value(), and THROW_EXCEPTION_FMT.
Referenced by mrpt::hwdrivers::CGPSInterface::loadConfig_sensorSpecific(), mrpt::hwdrivers::CKinect::loadConfig_sensorSpecific(), mrpt::hwdrivers::CVelodyneScanner::loadConfig_sensorSpecific(), mrpt::slam::CICP::TConfigParams::loadFromConfigFile(), and mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions::loadFromConfigFile().
◆ read_float()
| float CConfigFileBase::read_float | ( | const std::string & | section, |
| const std::string & | name, | ||
| float | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Definition at line 73 of file CConfigFileBase.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::internal_loadFromConfigFile_common(), mrpt::pbmap::config_heuristics::load_params(), mrpt::hwdrivers::CBoardSonars::loadConfig_sensorSpecific(), mrpt::hwdrivers::CCameraSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGPSInterface::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGyroKVHDSP3000::loadConfig_sensorSpecific(), mrpt::hwdrivers::CHokuyoURG::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIbeoLuxETH::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUIntersense::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUXSens::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUXSens_MT4::loadConfig_sensorSpecific(), mrpt::hwdrivers::CLMS100Eth::loadConfig_sensorSpecific(), mrpt::hwdrivers::CPhidgetInterfaceKitProximitySensors::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRoboPeakLidar::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserSerial::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserUSB::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSkeletonTracker::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGillAnemometer::loadConfig_sensorSpecific(), mrpt::hwdrivers::CKinect::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2_RGBD360::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2Sensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRaePID::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), mrpt::hwdrivers::CVelodyneScanner::loadConfig_sensorSpecific(), mrpt::hwdrivers::CWirelessPower::loadConfig_sensorSpecific(), mrpt::maps::CBeaconMap::TLikelihoodOptions::loadFromConfigFile(), mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::loadFromConfigFile(), mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions::loadFromConfigFile(), mrpt::slam::CICP::TConfigParams::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TInsertionOptions::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TLikelihoodOptions::loadFromConfigFile(), mrpt::vision::TStereoSystemParams::loadFromConfigFile(), mrpt::vision::TMatchingOptions::loadFromConfigFile(), mrpt::hwdrivers::TCaptureOptions_DUO3D::loadOptionsFrom(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::loadOptionsFrom(), readConfigFile(), and run_test_pf_localization().
◆ read_int()
| int CConfigFileBase::read_int | ( | const std::string & | section, |
| const std::string & | name, | ||
| int | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Definition at line 81 of file CConfigFileBase.cpp.
Referenced by mrpt::detectors::CCascadeClassifierDetection::init(), mrpt::detectors::CFaceDetection::init(), mrpt::nav::PlannerTPS_VirtualBase::internal_loadConfig_PTG(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::internal_loadFromConfigFile_common(), mrpt::pbmap::config_heuristics::load_params(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::CBoardSonars::loadConfig_sensorSpecific(), mrpt::hwdrivers::CCameraSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CCANBusReader::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGPSInterface::loadConfig_sensorSpecific(), mrpt::hwdrivers::CHokuyoURG::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUIntersense::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUXSens::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUXSens_MT4::loadConfig_sensorSpecific(), mrpt::hwdrivers::CLMS100Eth::loadConfig_sensorSpecific(), mrpt::hwdrivers::CPhidgetInterfaceKitProximitySensors::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserSerial::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGillAnemometer::loadConfig_sensorSpecific(), mrpt::hwdrivers::CImpinjRFID::loadConfig_sensorSpecific(), mrpt::hwdrivers::CKinect::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2_RGBD360::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2Sensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRaePID::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRoboticHeadInterface::loadConfig_sensorSpecific(), mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::loadFromConfigFile(), mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions::loadFromConfigFile(), mrpt::maps::CMultiMetricMapPDF::TPredictionParams::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TInsertionOptions::loadFromConfigFile(), mrpt::maps::CLandmarksMap::TLikelihoodOptions::loadFromConfigFile(), mrpt::vision::TStereoSystemParams::loadFromConfigFile(), mrpt::vision::TMatchingOptions::loadFromConfigFile(), mrpt::vision::TMultiResDescOptions::loadFromConfigFile(), mrpt::hwdrivers::TCaptureOptions_DUO3D::loadOptionsFrom(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::loadOptionsFrom(), readConfigFile(), mrpt::gui::CPanelCameraSelection::readConfigIntoVideoSourcePanel(), run_test_pf_localization(), and TEST().
◆ read_matrix()
|
inline |
Reads a configuration parameter as a matrix written in a matlab-like format - for example: "[2 3 4 ; 7 8 9]".
This template method can be instantiated for matrices of the types: int, long, unsinged int, unsigned long, float, double, long double
- Exceptions
-
std::exception If the key name is not found and "failIfNotFound" is true. Otherwise the "defaultValue" is returned.
Definition at line 126 of file CConfigFileBase.h.
References THROW_EXCEPTION_FMT.
Referenced by mrpt::topography::path_from_rtk_gps().
◆ read_string()
| std::string CConfigFileBase::read_string | ( | const std::string & | section, |
| const std::string & | name, | ||
| const std::string & | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Definition at line 112 of file CConfigFileBase.cpp.
References mrpt::system::trim().
Referenced by mrpt::detectors::CCascadeClassifierDetection::init(), mrpt::nav::PlannerTPS_VirtualBase::internal_loadConfig_PTG(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::internal_loadFromConfigFile_common(), mrpt::pbmap::config_heuristics::load_params(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::CBoardSonars::loadConfig_sensorSpecific(), mrpt::hwdrivers::CCameraSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CCANBusReader::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGPSInterface::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGyroKVHDSP3000::loadConfig_sensorSpecific(), mrpt::hwdrivers::CHokuyoURG::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUXSens::loadConfig_sensorSpecific(), mrpt::hwdrivers::CIMUXSens_MT4::loadConfig_sensorSpecific(), mrpt::hwdrivers::CLMS100Eth::loadConfig_sensorSpecific(), mrpt::hwdrivers::CNationalInstrumentsDAQ::loadConfig_sensorSpecific(), mrpt::hwdrivers::CPhidgetInterfaceKitProximitySensors::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRoboPeakLidar::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserSerial::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserUSB::loadConfig_sensorSpecific(), mrpt::hwdrivers::CBoardENoses::loadConfig_sensorSpecific(), mrpt::hwdrivers::CEnoseModular::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGillAnemometer::loadConfig_sensorSpecific(), mrpt::hwdrivers::CImpinjRFID::loadConfig_sensorSpecific(), mrpt::hwdrivers::CKinect::loadConfig_sensorSpecific(), mrpt::hwdrivers::COpenNI2Sensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRaePID::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), mrpt::hwdrivers::CWirelessPower::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRoboticHeadInterface::loadConfig_sensorSpecific(), mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::loadFromConfigFile(), mrpt::maps::CHeightGridMap2D::TInsertionOptions::loadFromConfigFile(), mrpt::utils::TStereoCamera::loadFromConfigFile(), mrpt::hwdrivers::TCaptureOptions_DUO3D::loadOptionsFrom(), mrpt::hwdrivers::TCaptureOptions_FlyCapture2::loadOptionsFrom(), readConfigFile(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), mrpt::gui::CPanelCameraSelection::readConfigIntoVideoSourcePanel(), run_test_pf_localization(), TEST(), and mrpt::gui::CPanelCameraSelection::writeConfigFromVideoSourcePanel().
◆ read_string_first_word()
| std::string CConfigFileBase::read_string_first_word | ( | const std::string & | section, |
| const std::string & | name, | ||
| const std::string & | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Reads a configuration parameter of type "string", and keeps only the first word (this can be used to eliminate possible comments at the end of the line)
Definition at line 120 of file CConfigFileBase.cpp.
References THROW_EXCEPTION, and mrpt::system::tokenize().
Referenced by mrpt::hwdrivers::CCameraSensor::loadConfig_sensorSpecific().
◆ read_uint64_t()
| uint64_t CConfigFileBase::read_uint64_t | ( | const std::string & | section, |
| const std::string & | name, | ||
| uint64_t | defaultValue, | ||
| bool | failIfNotFound = false |
||
| ) | const |
Definition at line 90 of file CConfigFileBase.cpp.
References mrpt::system::os::_strtoull().
Referenced by mrpt::hwdrivers::CNationalInstrumentsDAQ::loadConfig_sensorSpecific(), mrpt::hwdrivers::CBoardENoses::loadConfig_sensorSpecific(), mrpt::hwdrivers::CEnoseModular::loadConfig_sensorSpecific(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), mrpt::maps::TSetOfMetricMapInitializers::loadFromConfigFile(), and mrpt::hwdrivers::TCaptureOptions_FlyCapture2::loadOptionsFrom().
◆ read_vector()
|
inline |
Reads a configuration parameter of type vector, stored in the file as a string: "[v1 v2 v3 ... ]", where spaces could also be commas.
- Exceptions
-
std::exception If the key name is not found and "failIfNotFound" is true. Otherwise the "defaultValue" is returned.
Definition at line 92 of file CConfigFileBase.h.
References mrpt::system::tokenize().
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams(), mrpt::hwdrivers::CBoardSonars::loadConfig_sensorSpecific(), mrpt::hwdrivers::CBoardENoses::loadConfig_sensorSpecific(), mrpt::hwdrivers::CRoboticHeadInterface::loadConfig_sensorSpecific(), mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions::loadFromConfigFile(), mrpt::vision::TStereoSystemParams::loadFromConfigFile(), mrpt::vision::TMultiResDescOptions::loadFromConfigFile(), mrpt::utils::TCamera::loadFromConfigFile(), and run_test_pf_localization().
◆ readString()
|
protectedpure virtual |
A virtual method to read a generic string.
- Exceptions
-
std::exception If the key name is not found and "failIfNotFound" is true. Otherwise the "defaultValue" is returned.
Implemented in mrpt::utils::CConfigFilePrefixer, mrpt::utils::CConfigFileMemory, and mrpt::utils::CConfigFile.
Referenced by mrpt::utils::CConfigFilePrefixer::readString().
◆ sectionExists()
| bool CConfigFileBase::sectionExists | ( | const std::string & | section_name | ) | const |
Checks if a given section exists (name is case insensitive)
Definition at line 139 of file CConfigFileBase.cpp.
References mrpt::system::os::_strcmpi().
Referenced by mrpt::hwdrivers::CPhidgetInterfaceKitProximitySensors::loadConfig_sensorSpecific(), and mrpt::hwdrivers::COpenNI2Sensor::loadConfig_sensorSpecific().
◆ write() [1/4]
|
inline |
Definition at line 63 of file CConfigFileBase.h.
Referenced by run_rnav_test(), mrpt::utils::TCamera::saveToConfigFile(), mrpt::utils::TStereoCamera::saveToConfigFile(), mrpt::vision::TMultiResDescMatchOptions::saveToConfigFile(), mrpt::vision::TMultiResDescOptions::saveToConfigFile(), mrpt::nav::CParameterizedTrajectoryGenerator::saveToConfigFile(), mrpt::nav::CPTG_RobotShape_Polygonal::saveToConfigFile(), mrpt::nav::CPTG_RobotShape_Circular::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_alpha::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_C::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_CC::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_CCS::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_CS::saveToConfigFile(), mrpt::nav::CPTG_Holo_Blend::saveToConfigFile(), TEST(), and mrpt::gui::CPanelCameraSelection::writeConfigFromVideoSourcePanel().
◆ write() [2/4]
|
inline |
Definition at line 70 of file CConfigFileBase.h.
◆ write() [3/4]
| void CConfigFileBase::write | ( | const std::string & | section, |
| const std::string & | name, | ||
| double | value, | ||
| const int | name_padding_width = -1, |
||
| const int | value_padding_width = -1, |
||
| const std::string & | comment = std::string() |
||
| ) |
Definition at line 27 of file CConfigFileBase.cpp.
◆ write() [4/4]
| void CConfigFileBase::write | ( | const std::string & | section, |
| const std::string & | name, | ||
| float | value, | ||
| const int | name_padding_width = -1, |
||
| const int | value_padding_width = -1, |
||
| const std::string & | comment = std::string() |
||
| ) |
Definition at line 31 of file CConfigFileBase.cpp.
◆ writeString() [1/2]
|
protectedpure virtual |
A virtual method to write a generic string.
Implemented in mrpt::utils::CConfigFilePrefixer, mrpt::utils::CConfigFileMemory, and mrpt::utils::CConfigFile.
Referenced by mrpt::utils::CConfigFilePrefixer::writeString().
◆ writeString() [2/2]
|
protected |
Write a generic string with optional padding and a comment field ("// ...") at the end of the line.
Definition at line 37 of file CConfigFileBase.cpp.
References mrpt::format().
Friends And Related Function Documentation
◆ CConfigFilePrefixer
|
friend |
Definition at line 35 of file CConfigFileBase.h.