#include "gnss_messages_common.h"
Include dependency graph for gnss_messages_novatel.h:
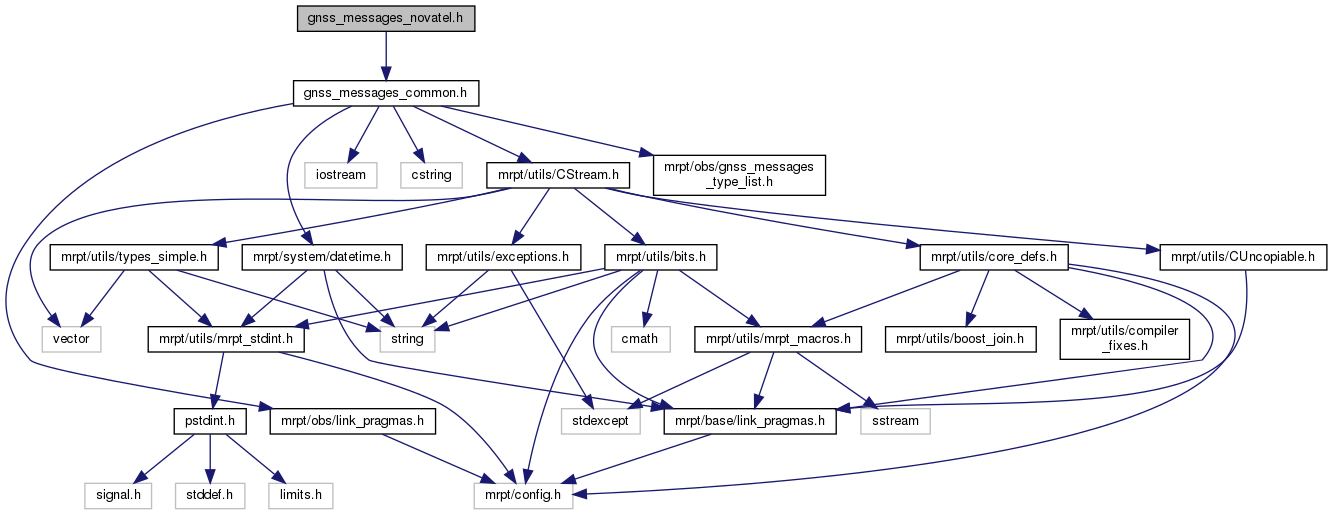
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::obs::gnss::nv_oem6_header_t |
| Novatel OEM6 regular header structure. More... | |
| struct | mrpt::obs::gnss::nv_oem6_short_header_t |
| Novatel OEM6 short header structure. More... | |
| struct | mrpt::obs::gnss::Message_NV_OEM6_GENERIC_FRAME |
| Novatel generic frame (to store frames without a parser at the present time). More... | |
| struct | mrpt::obs::gnss::Message_NV_OEM6_GENERIC_SHORT_FRAME |
| Novatel generic short-header frame (to store frames without a parser at the present time). More... | |
| struct | mrpt::obs::gnss::Message_NV_OEM6_RANGECMP |
| Novatel frame: NV_OEM6_RANGECMP. More... | |
| struct | mrpt::obs::gnss::Message_NV_OEM6_RANGECMP::TCompressedRangeLog |
| struct | mrpt::obs::gnss::Message_NV_OEM6_VERSION |
| Novatel frame: NV_OEM6_VERSION. More... | |
| struct | mrpt::obs::gnss::Message_NV_OEM6_VERSION::TComponentVersion |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
| mrpt::obs::gnss | |
| GNSS (GPS) data structures, mainly for use within mrpt::obs::CObservationGPS. | |
| mrpt::obs::gnss::nv_oem6_position_type | |
| mrpt::obs::gnss::nv_oem6_solution_status | |
| mrpt::obs::gnss::nv_oem6_ins_status_type | |
Functions | |
| const std::string OBS_IMPEXP & | mrpt::obs::gnss::nv_oem6_position_type::enum2str (int val) |
| for nv_position_type_t More... | |
| const std::string OBS_IMPEXP & | mrpt::obs::gnss::nv_oem6_solution_status::enum2str (int val) |
| for nv_solution_status_t More... | |
| const std::string OBS_IMPEXP & | mrpt::obs::gnss::nv_oem6_ins_status_type::enum2str (int val) |
| for nv_ins_status_type_t More... | |
| template<class TGEODETICCOORDS > | |
| GNSS_BINARY_MSG_DEFINITION_MID TGEODETICCOORDS | mrpt::obs::gnss::getAsStruct () const |
| Return the geodetic coords as a mrpt::topography::TGeodeticCoords structure (requires linking against mrpt-topography) Call as: getAsStruct<TGeodeticCoords>();. More... | |
| bool | mrpt::obs::gnss::getAllFieldDescriptions (std::ostream &o) const MRPT_OVERRIDE |
| bool | mrpt::obs::gnss::getAllFieldValues (std::ostream &o) const MRPT_OVERRIDE |