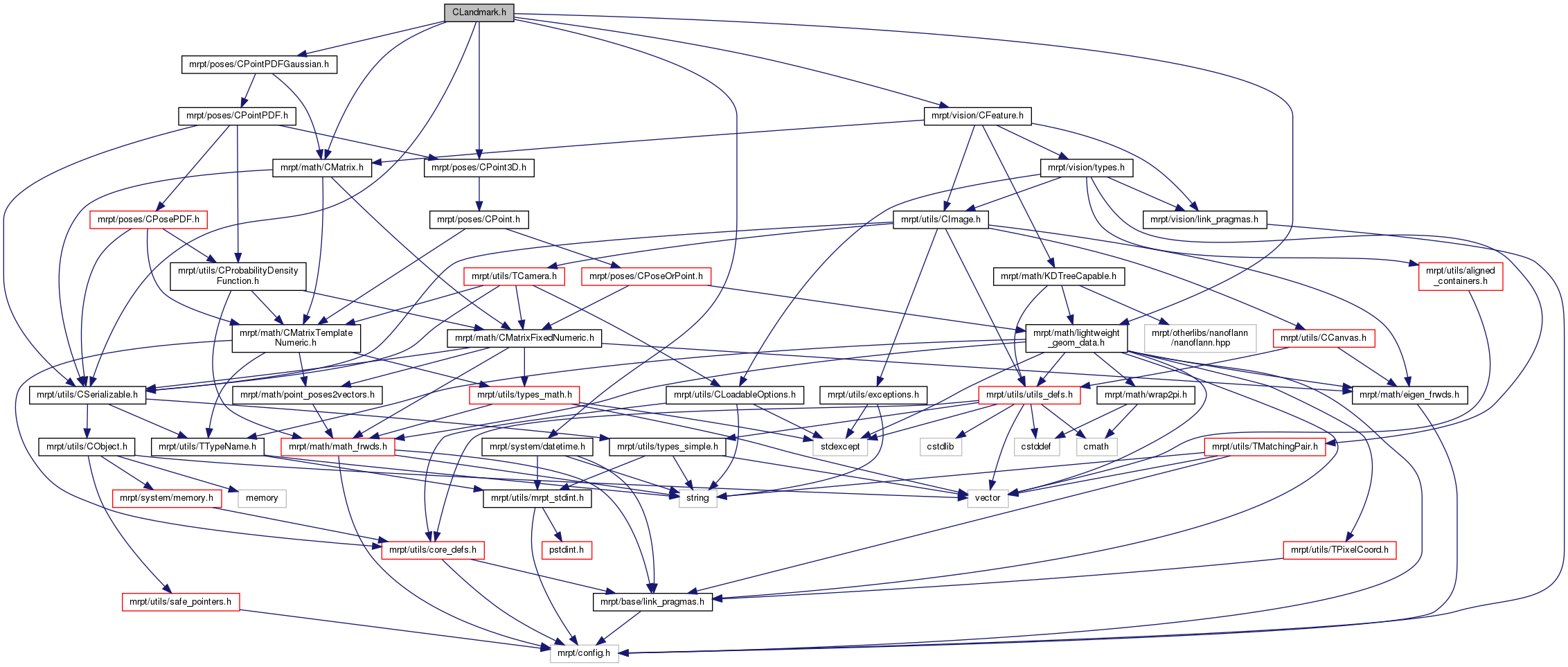
#include <mrpt/utils/CSerializable.h>#include <mrpt/math/CMatrix.h>#include <mrpt/system/datetime.h>#include <mrpt/poses/CPointPDFGaussian.h>#include <mrpt/poses/CPoint3D.h>#include <mrpt/vision/CFeature.h>#include <mrpt/math/lightweight_geom_data.h>
Include dependency graph for maps/CLandmark.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::CLandmark |
| The class for storing "landmarks" (visual or laser-scan-extracted features,...) More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, CLandmarkPtr &pObj) |