Detailed Description
template<typename node_pose_t, typename world_limits_t>
struct mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >
Definition at line 29 of file PlannerRRT_common.h.
#include <mrpt/nav/planners/PlannerRRT_common.h>
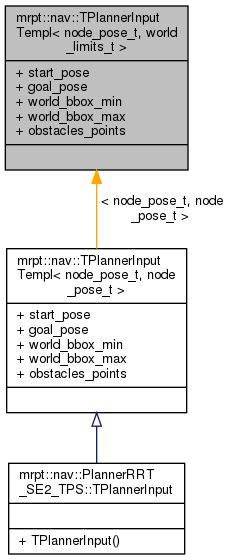
Public Attributes | |
| node_pose_t | start_pose |
| node_pose_t | goal_pose |
| world_limits_t | world_bbox_min |
| world_limits_t | world_bbox_max |
| Bounding box of the world, used to draw uniform random pose samples. More... | |
| mrpt::maps::CSimplePointsMap | obstacles_points |
| World obstacles, as a point cloud. More... | |
Member Data Documentation
◆ goal_pose
| node_pose_t mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::goal_pose |
Definition at line 31 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ obstacles_points
| mrpt::maps::CSimplePointsMap mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::obstacles_points |
World obstacles, as a point cloud.
Definition at line 33 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ start_pose
| node_pose_t mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::start_pose |
Definition at line 31 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ world_bbox_max
| world_limits_t mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::world_bbox_max |
Bounding box of the world, used to draw uniform random pose samples.
Definition at line 32 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().
◆ world_bbox_min
| world_limits_t mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::world_bbox_min |
Definition at line 32 of file PlannerRRT_common.h.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree(), and mrpt::nav::PlannerRRT_SE2_TPS::solve().