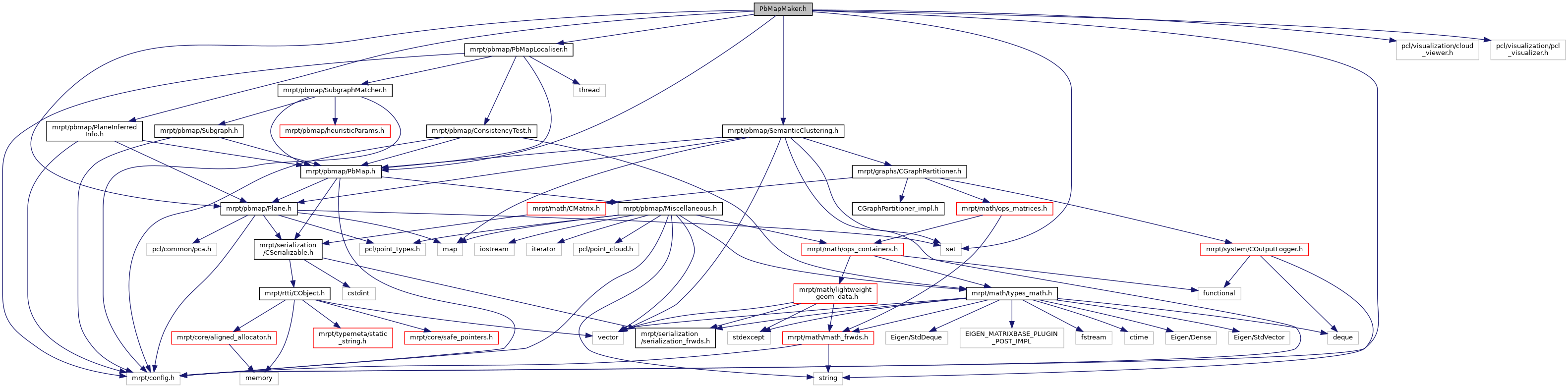
#include <mrpt/config.h>#include <pcl/visualization/cloud_viewer.h>#include <pcl/visualization/pcl_visualizer.h>#include <mrpt/pbmap/Plane.h>#include <mrpt/pbmap/PlaneInferredInfo.h>#include <mrpt/pbmap/PbMap.h>#include <mrpt/pbmap/PbMapLocaliser.h>#include <mrpt/pbmap/SemanticClustering.h>#include <set>
Include dependency graph for PbMapMaker.h:
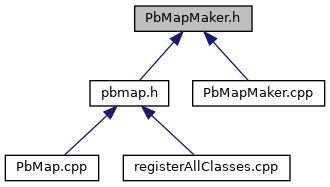
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::pbmap::frameRGBDandPose |
| class | mrpt::pbmap::PbMapMaker |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::pbmap | |
Typedefs | |
| using | PointT = pcl::PointXYZRGBA |
Typedef Documentation
◆ PointT
| using PointT = pcl::PointXYZRGBA |
Definition at line 32 of file PbMapMaker.h.