#include <mrpt/synch/CCriticalSection.h>#include <mrpt/utils/COutputLogger.h>#include <mrpt/utils/CMessageQueue.h>#include <mrpt/system/threads.h>#include <mrpt/hmtslam/HMT_SLAM_common.h>#include <mrpt/hmtslam/CLocalMetricHypothesis.h>#include <mrpt/hmtslam/CHierarchicalMHMap.h>#include <mrpt/hmtslam/CTopLCDetector_GridMatching.h>#include <mrpt/hmtslam/CTopLCDetector_FabMap.h>#include <mrpt/hmtslam/link_pragmas.h>#include <mrpt/slam/CICP.h>#include <mrpt/maps/CPointsMap.h>#include <mrpt/slam/TKLDParams.h>#include <mrpt/obs/CActionCollection.h>#include <mrpt/opengl/COpenGLScene.h>#include <queue>
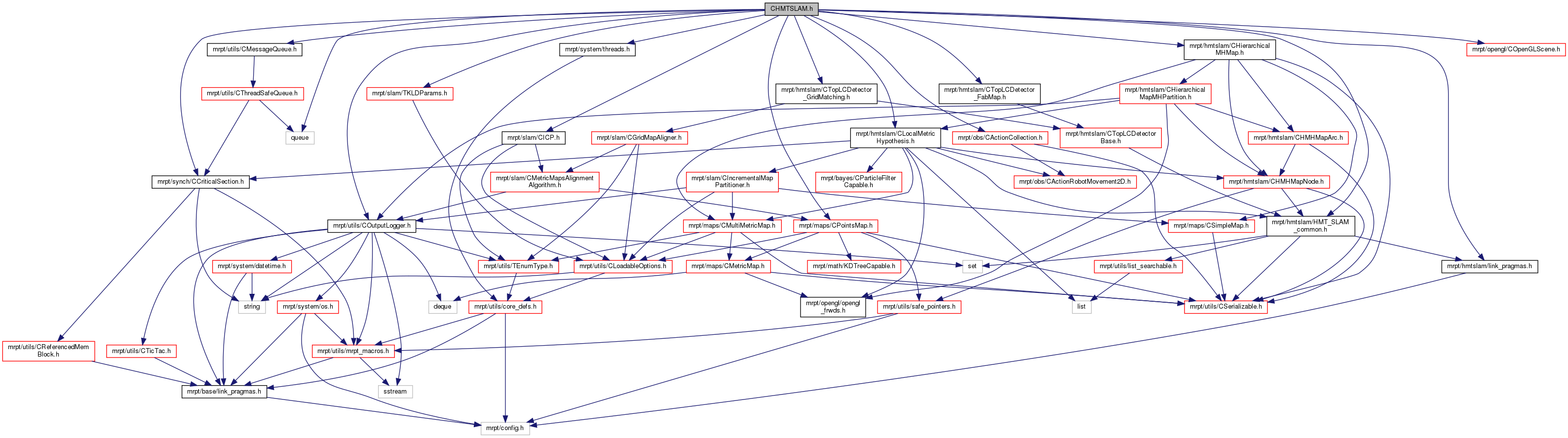
Include dependency graph for CHMTSLAM.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::hmtslam::CHMTSLAM |
| An implementation of Hybrid Metric Topological SLAM (HMT-SLAM). More... | |
| struct | mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromAA |
| Message definition: More... | |
| struct | mrpt::hmtslam::CHMTSLAM::TMessageLSLAMtoTBI |
| Message definition: More... | |
| struct | mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI |
| Message definition: More... | |
| struct | mrpt::hmtslam::CHMTSLAM::TMessageLSLAMfromTBI::TBI_info |
| struct | mrpt::hmtslam::CHMTSLAM::TOptions |
| A variety of options and configuration params (private, use loadOptions). More... | |
| class | mrpt::hmtslam::CLSLAMAlgorithmBase |
| Virtual base for local SLAM methods, used in mrpt::slam::CHMTSLAM. More... | |
| class | mrpt::hmtslam::CLSLAM_RBPF_2DLASER |
| Implements a 2D local SLAM method based on a RBPF over an occupancy grid map. More... | |
| struct | mrpt::hmtslam::CLSLAM_RBPF_2DLASER::TPathBin |
| Auxiliary structure. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hmtslam | |
| Classes related to the implementation of Hybrid Metric Topological (HMT) SLAM. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::hmtslam::operator>> (mrpt::utils::CStream &in, CHMTSLAMPtr &pObj) |