Detailed Description
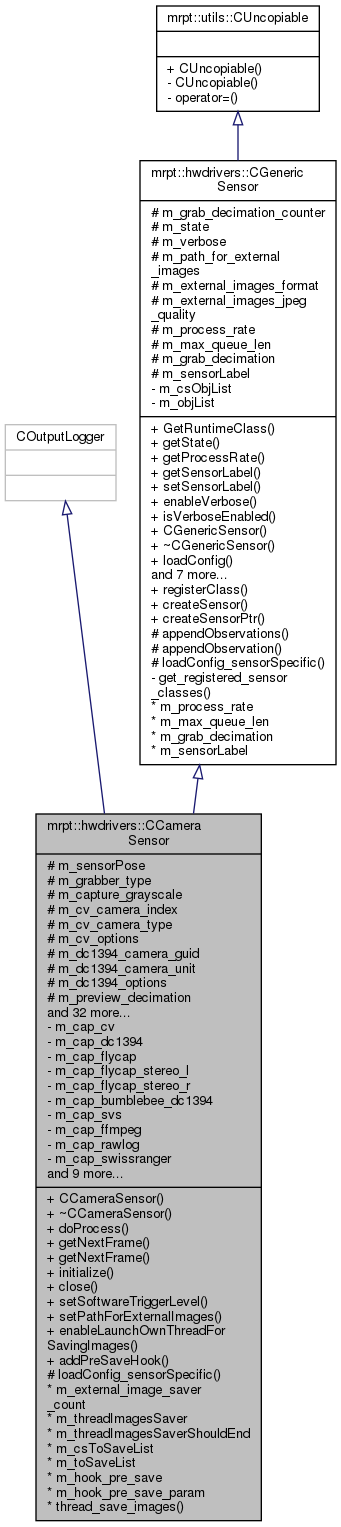
The central class for camera grabbers in MRPT, implementing the "generic sensor" interface.
This class provides the user with a uniform interface to a variety of other classes which manage only one specific camera "driver" (opencv, ffmpeg, PGR FlyCapture,...)
Following the "generic sensor" interface, all the parameters must be passed int the form of a configuration file, which may be also formed on the fly (without being a real config file) as in this example:
Images can be retrieved through the normal "doProcess()" interface, or the specific method "getNextFrame()".
Some notes:
- "grabber_type" determines the class to use internally for image capturing (see below).
- For the meaning of cv_camera_type and other parameters, refer to mrpt::hwdrivers::CImageGrabber_OpenCV
- For the parameters of dc1394 parameters, refer to generic IEEE1394 documentation, and to mrpt::hwdrivers::TCaptureOptions_dc1394.
- If the high number of existing parameters annoy you, try the function prepareVideoSourceFromUserSelection(), which displays a GUI dialog to the user so he/she can choose the desired camera & its parameters.
Images can be saved in the "external storage" mode. Detached threads are created for this task. See setPathForExternalImages() and setExternalImageFormat(). These methods are called automatically from the app rawlog-grabber.
These is the list of all accepted parameters:
- Note
- The execution rate, in rawlog-grabber or the user code calling doProcess(), should be greater than the required capture FPS.
- In Linux you may need to execute "chmod 666 /dev/video1394/ * " and "chmod 666 /dev/raw1394" for allowing any user R/W access to firewire cameras.
-
[New in MRPT 1.4.0] The
bumblebeedriver has been deleted, use theflycapdriver in stereo mode.
- See also
- mrpt::hwdrivers::CImageGrabber_OpenCV, mrpt::hwdrivers::CImageGrabber_dc1394, CGenericSensor, prepareVideoSourceFromUserSelection()
Definition at line 243 of file CCameraSensor.h.
#include <mrpt/hwdrivers/CCameraSensor.h>
Public Types | |
| typedef void(* | TPreSaveUserHook) (const mrpt::obs::CObservationPtr &obs, void *user_ptr) |
| Functor type. More... | |
| enum | TSensorState { ssInitializing = 0 , ssWorking , ssError } |
| The current state of the sensor. More... | |
| typedef std::multimap< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObservations |
| typedef std::pair< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObsPair |
| typedef CGenericSensorPtr | Ptr |
| typedef stlplus::smart_ptr< const CGenericSensor > | ConstPtr |
Public Member Functions | |
| CCameraSensor () | |
| Constructor. More... | |
| virtual | ~CCameraSensor () |
| Destructor. More... | |
| void | doProcess () |
| This method will be invoked at a minimum rate of "process_rate" (Hz) More... | |
| mrpt::obs::CObservationPtr | getNextFrame () |
| Retrieves the next frame from the video source, raising an exception on any error. More... | |
| void | getNextFrame (std::vector< mrpt::utils::CSerializablePtr > &out_obs) |
| virtual void | initialize () |
| Tries to open the camera, after setting all the parameters with a call to loadConfig. More... | |
| void | close () |
| Close the camera (if open). More... | |
| void | setSoftwareTriggerLevel (bool level) |
| Set Software trigger level value (ON or OFF) for cameras with this function available. More... | |
| virtual void | setPathForExternalImages (const std::string &directory) |
| Set the path where to save off-rawlog image files (this class DOES take into account this path). More... | |
| void | enableLaunchOwnThreadForSavingImages (bool enable=true) |
| This must be called before initialize() More... | |
| void | addPreSaveHook (TPreSaveUserHook user_function, void *user_ptr) |
| Provides a "hook" for user-code to be run BEFORE an image is going to be saved to disk if external storage is enabled (e.g. More... | |
| virtual const mrpt::hwdrivers::TSensorClassId * | GetRuntimeClass () const =0 |
| TSensorState | getState () const |
| The current state of the sensor More... | |
| double | getProcessRate () const |
| std::string | getSensorLabel () const |
| void | setSensorLabel (const std::string &sensorLabel) |
| void | enableVerbose (bool enabled=true) |
| Enable or disable extra debug info dumped to std::cout during sensor operation. More... | |
| bool | isVerboseEnabled () const |
| void | loadConfig (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| void | getObservations (TListObservations &lstObjects) |
| Returns a list of enqueued objects, emptying it (thread-safe). More... | |
| void | setExternalImageFormat (const std::string &ext) |
| Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg". More... | |
| void | setExternalImageJPEGQuality (const unsigned int quality) |
| The quality of JPEG compression, when external images is enabled and the format is "jpg". More... | |
| unsigned int | getExternalImageJPEGQuality () const |
Static Public Member Functions | |
| static void | registerClass (const TSensorClassId *pNewClass) |
| Register a class into the internal list of "CGenericSensor" descendents. More... | |
| static CGenericSensor * | createSensor (const std::string &className) |
| Creates a sensor by a name of the class. More... | |
| static CGenericSensorPtr | createSensorPtr (const std::string &className) |
| Just like createSensor, but returning a smart pointer to the newly created sensor object. More... | |
Protected Member Functions | |
| void | loadConfig_sensorSpecific (const mrpt::utils::CConfigFileBase &configSource, const std::string &iniSection) |
| See the class documentation at the top for expected parameters. More... | |
| void | appendObservations (const std::vector< mrpt::utils::CSerializablePtr > &obj) |
| This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations. More... | |
| void | appendObservation (const mrpt::utils::CSerializablePtr &obj) |
| Like appendObservations() but for just one observation. More... | |
Private Types | |
| typedef std::map< std::string, const TSensorClassId * > | registered_sensor_classes_t |
| Used in registerClass. More... | |
Static Private Member Functions | |
| static registered_sensor_classes_t & | get_registered_sensor_classes () |
| Access to singleton. More... | |
Stuff related to working threads to save images to disk | |
| unsigned int | m_external_image_saver_count |
| Number of working threads. Default:1, set to 2 in quad cores. More... | |
| std::vector< mrpt::system::TThreadHandle > | m_threadImagesSaver |
| bool | m_threadImagesSaverShouldEnd |
| mrpt::synch::CCriticalSection | m_csToSaveList |
| The critical section for m_toSaveList. More... | |
| std::vector< TListObservations > | m_toSaveList |
| The queues of objects to be returned by getObservations, one for each working thread. More... | |
| TPreSaveUserHook | m_hook_pre_save |
| void * | m_hook_pre_save_param |
| void | thread_save_images (unsigned int my_working_thread_index) |
| Thread to save images to files. More... | |
Member Typedef Documentation
◆ ConstPtr
|
inherited |
Definition at line 103 of file CGenericSensor.h.
◆ Ptr
|
inherited |
Definition at line 102 of file CGenericSensor.h.
◆ registered_sensor_classes_t
|
privateinherited |
Used in registerClass.
Definition at line 109 of file CGenericSensor.h.
◆ TListObservations
|
inherited |
Definition at line 68 of file CGenericSensor.h.
◆ TListObsPair
|
inherited |
Definition at line 69 of file CGenericSensor.h.
◆ TPreSaveUserHook
| typedef void(* mrpt::hwdrivers::CCameraSensor::TPreSaveUserHook) (const mrpt::obs::CObservationPtr &obs, void *user_ptr) |
Functor type.
Definition at line 290 of file CCameraSensor.h.
Member Enumeration Documentation
◆ TSensorState
|
inherited |
The current state of the sensor.
- See also
- CGenericSensor::getState
| Enumerator | |
|---|---|
| ssInitializing | |
| ssWorking | |
| ssError | |
Definition at line 74 of file CGenericSensor.h.
Constructor & Destructor Documentation
◆ CCameraSensor()
| CCameraSensor::CCameraSensor | ( | ) |
Constructor.
The camera is not open until "initialize" is called.
Definition at line 39 of file CCameraSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::ssInitializing.
◆ ~CCameraSensor()
|
virtual |
Destructor.
Definition at line 574 of file CCameraSensor.cpp.
Member Function Documentation
◆ addPreSaveHook()
|
inline |
Provides a "hook" for user-code to be run BEFORE an image is going to be saved to disk if external storage is enabled (e.g.
to rectify images, preprocess them, etc.) Notice that this code may be called from detached threads, so it must be thread safe. If used, call this before initialize()
Definition at line 295 of file CCameraSensor.h.
◆ appendObservation()
|
inlineprotectedinherited |
Like appendObservations() but for just one observation.
Definition at line 147 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CCANBusReader::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), and mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow().
◆ appendObservations()
|
protectedinherited |
This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations.
Passed objects must be created in dynamic memory and a smart pointer passed. Example of creation:
If several observations are passed at once in the vector, they'll be considered as a block regarding the grabbing decimation factor.
Definition at line 53 of file CGenericSensor.cpp.
References CLASS_ID, mrpt::hwdrivers::CGenericSensor::m_csObjList, mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_objList, and THROW_EXCEPTION.
Referenced by mrpt::hwdrivers::CKinect::doProcess(), and mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess().
◆ close()
| void CCameraSensor::close | ( | ) |
Close the camera (if open).
This method is called automatically on destruction.
Definition at line 360 of file CCameraSensor.cpp.
References mrpt::utils::delete_safe(), mrpt::system::joinThread(), and mrpt::hwdrivers::CGenericSensor::ssInitializing.
◆ createSensor()
|
staticinherited |
Creates a sensor by a name of the class.
Typically the user may want to create a smart pointer around the returned pointer, whis is made with:
- Returns
- A pointer to a new class, or NULL if class name is unknown.
Definition at line 103 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
◆ createSensorPtr()
|
inlinestaticinherited |
Just like createSensor, but returning a smart pointer to the newly created sensor object.
Definition at line 180 of file CGenericSensor.h.
◆ doProcess()
|
virtual |
This method will be invoked at a minimum rate of "process_rate" (Hz)
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 1129 of file CCameraSensor.cpp.
◆ enableLaunchOwnThreadForSavingImages()
|
inline |
This must be called before initialize()
Definition at line 287 of file CCameraSensor.h.
◆ enableVerbose()
|
inlineinherited |
Enable or disable extra debug info dumped to std::cout during sensor operation.
Default: disabled unless the environment variable "MRPT_HWDRIVERS_VERBOSE" is set to "1" during object creation.
Definition at line 92 of file CGenericSensor.h.
◆ get_registered_sensor_classes()
|
staticprivateinherited |
Access to singleton.
Definition at line 111 of file CGenericSensor.cpp.
Referenced by mrpt::hwdrivers::CGenericSensor::createSensor(), and mrpt::hwdrivers::CGenericSensor::registerClass().
◆ getExternalImageJPEGQuality()
|
inlineinherited |
Definition at line 234 of file CGenericSensor.h.
◆ getNextFrame() [1/2]
| CObservationPtr CCameraSensor::getNextFrame | ( | ) |
Retrieves the next frame from the video source, raising an exception on any error.
Note: The returned observations can be of one of these classes (you can use IS_CLASS(obs,CObservationXXX) to determine it):
- mrpt::obs::CObservationImage (For normal cameras or video sources)
- mrpt::obs::CObservationStereoImages (For stereo cameras)
- mrpt::obs::CObservation3DRangeScan (For 3D cameras)
Definition at line 584 of file CCameraSensor.cpp.
◆ getNextFrame() [2/2]
| void mrpt::hwdrivers::CCameraSensor::getNextFrame | ( | std::vector< mrpt::utils::CSerializablePtr > & | out_obs | ) |
◆ getObservations()
|
inherited |
Returns a list of enqueued objects, emptying it (thread-safe).
The objects must be freed by the invoker.
Definition at line 90 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::m_csObjList, and mrpt::hwdrivers::CGenericSensor::m_objList.
◆ getProcessRate()
|
inlineinherited |
Definition at line 84 of file CGenericSensor.h.
◆ GetRuntimeClass()
|
pure virtualinherited |
◆ getSensorLabel()
|
inlineinherited |
Definition at line 86 of file CGenericSensor.h.
◆ getState()
|
inlineinherited |
The current state of the sensor
Definition at line 82 of file CGenericSensor.h.
◆ initialize()
Tries to open the camera, after setting all the parameters with a call to loadConfig.
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 112 of file CCameraSensor.cpp.
References mrpt::utils::CTypeSelector::checkTypeIndex(), mrpt::system::createThreadFromObjectMethod(), mrpt::format(), mrpt::system::lowerCase(), mrpt::hwdrivers::CGenericSensor::ssError, mrpt::hwdrivers::CGenericSensor::ssWorking, mrpt::hwdrivers::CImageGrabber_FlyCapture2::startSyncCapture(), thread_save_images(), THROW_EXCEPTION, THROW_EXCEPTION_FMT, mrpt::system::trim(), mrpt::system::upperCase(), mrpt::hwdrivers::CKinect::VIDEO_CHANNEL_IR, and mrpt::hwdrivers::CKinect::VIDEO_CHANNEL_RGB.
◆ isVerboseEnabled()
|
inlineinherited |
Definition at line 93 of file CGenericSensor.h.
◆ loadConfig()
|
inherited |
Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 131 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_max_queue_len, mrpt::hwdrivers::CGenericSensor::m_process_rate, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, MRPT_END, MRPT_START, mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
◆ loadConfig_sensorSpecific()
|
protectedvirtual |
See the class documentation at the top for expected parameters.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 390 of file CCameraSensor.cpp.
References ADD_COLOR_MAP, mrpt::hwdrivers::COLOR_CODING_MONO16, mrpt::hwdrivers::COLOR_CODING_MONO8, mrpt::hwdrivers::COLOR_CODING_RGB8, mrpt::hwdrivers::COLOR_CODING_YUV411, mrpt::hwdrivers::COLOR_CODING_YUV422, mrpt::hwdrivers::COLOR_CODING_YUV444, DEG2RAD, mrpt::hwdrivers::FRAMERATE_120, mrpt::hwdrivers::FRAMERATE_15, mrpt::hwdrivers::FRAMERATE_1_875, mrpt::hwdrivers::FRAMERATE_240, mrpt::hwdrivers::FRAMERATE_30, mrpt::hwdrivers::FRAMERATE_3_75, mrpt::hwdrivers::FRAMERATE_60, mrpt::hwdrivers::FRAMERATE_7_5, MRPT_LOAD_HERE_CONFIG_VAR, mrpt::utils::CConfigFileBase::read_bool(), mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_float(), mrpt::utils::CConfigFileBase::read_int(), mrpt::utils::CConfigFileBase::read_string(), mrpt::utils::CConfigFileBase::read_string_first_word(), THROW_EXCEPTION_FMT, mrpt::system::trim(), and mrpt::system::upperCase().
◆ registerClass()
|
staticinherited |
Register a class into the internal list of "CGenericSensor" descendents.
Used internally in the macros DEFINE_GENERIC_SENSOR, etc...
Can be used as "CGenericSensor::registerClass( SENSOR_CLASS_ID(CMySensor) );" if building custom sensors outside mrpt libraries in user code.
Definition at line 120 of file CGenericSensor.cpp.
References mrpt::hwdrivers::TSensorClassId::className, and mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR::CLASSINIT_GENERIC_SENSOR().
◆ setExternalImageFormat()
|
inlineinherited |
Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg".
Definition at line 226 of file CGenericSensor.h.
◆ setExternalImageJPEGQuality()
|
inlineinherited |
The quality of JPEG compression, when external images is enabled and the format is "jpg".
- See also
- setExternalImageFormat
Definition at line 231 of file CGenericSensor.h.
References quality.
◆ setPathForExternalImages()
|
virtual |
Set the path where to save off-rawlog image files (this class DOES take into account this path).
An empty string (the default value at construction) means to save images embedded in the rawlog, instead of on separate files.
- Exceptions
-
std::exception If the directory doesn't exists and cannot be created.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 1158 of file CCameraSensor.cpp.
References mrpt::system::createDirectory(), and THROW_EXCEPTION_FMT.
◆ setSensorLabel()
|
inlineinherited |
Definition at line 87 of file CGenericSensor.h.
◆ setSoftwareTriggerLevel()
| void CCameraSensor::setSoftwareTriggerLevel | ( | bool | level | ) |
Set Software trigger level value (ON or OFF) for cameras with this function available.
Definition at line 1139 of file CCameraSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::ssError, and THROW_EXCEPTION.
◆ thread_save_images()
|
private |
Thread to save images to files.
Definition at line 1318 of file CCameraSensor.cpp.
References mrpt::system::fileNameStripInvalidChars(), mrpt::format(), IS_CLASS, IS_DERIVED, mrpt::system::sleep(), mrpt::system::timestampTotime_t(), and mrpt::system::trim().
Referenced by initialize().
Member Data Documentation
◆ m_bumblebee_dc1394_camera_guid
|
protected |
Definition at line 317 of file CCameraSensor.h.
◆ m_bumblebee_dc1394_camera_unit
|
protected |
Definition at line 318 of file CCameraSensor.h.
◆ m_bumblebee_dc1394_framerate
|
protected |
Definition at line 319 of file CCameraSensor.h.
◆ m_camera_grab_decimator
|
private |
Definition at line 392 of file CCameraSensor.h.
◆ m_camera_grab_decimator_counter
|
private |
Definition at line 393 of file CCameraSensor.h.
◆ m_cap_bumblebee_dc1394
|
private |
Definition at line 381 of file CCameraSensor.h.
◆ m_cap_cv
|
private |
The OpenCV capture object.
Definition at line 377 of file CCameraSensor.h.
◆ m_cap_dc1394
|
private |
The dc1394 capture object.
Definition at line 378 of file CCameraSensor.h.
◆ m_cap_duo3d
|
private |
The DUO3D capture object.
Definition at line 389 of file CCameraSensor.h.
◆ m_cap_ffmpeg
|
private |
The FFMPEG capture object.
Definition at line 383 of file CCameraSensor.h.
◆ m_cap_flycap
|
private |
The FlyCapture2 object.
Definition at line 379 of file CCameraSensor.h.
◆ m_cap_flycap_stereo_l
|
private |
Definition at line 380 of file CCameraSensor.h.
◆ m_cap_flycap_stereo_r
|
private |
The FlyCapture2 object for stereo pairs.
Definition at line 380 of file CCameraSensor.h.
◆ m_cap_image_dir
|
private |
Read images from directory.
Definition at line 388 of file CCameraSensor.h.
◆ m_cap_kinect
|
private |
Kinect camera object.
Definition at line 386 of file CCameraSensor.h.
◆ m_cap_openni2
|
private |
OpenNI2 object.
Definition at line 387 of file CCameraSensor.h.
◆ m_cap_rawlog
|
private |
The input file for rawlogs.
Definition at line 384 of file CCameraSensor.h.
◆ m_cap_svs
|
private |
The svs capture object.
Definition at line 382 of file CCameraSensor.h.
◆ m_cap_swissranger
|
private |
SR 3D camera object.
Definition at line 385 of file CCameraSensor.h.
◆ m_capture_grayscale
|
protected |
Definition at line 302 of file CCameraSensor.h.
◆ m_csObjList
|
privateinherited |
The critical section for m_objList.
Definition at line 105 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::getObservations().
◆ m_csToSaveList
|
private |
The critical section for m_toSaveList.
Definition at line 404 of file CCameraSensor.h.
◆ m_cv_camera_index
|
protected |
Definition at line 305 of file CCameraSensor.h.
◆ m_cv_camera_type
|
protected |
Definition at line 306 of file CCameraSensor.h.
◆ m_cv_options
|
protected |
Definition at line 307 of file CCameraSensor.h.
◆ m_dc1394_camera_guid
|
protected |
Definition at line 310 of file CCameraSensor.h.
◆ m_dc1394_camera_unit
|
protected |
Definition at line 311 of file CCameraSensor.h.
◆ m_dc1394_options
|
protected |
Definition at line 312 of file CCameraSensor.h.
◆ m_duo3d_options
|
protected |
Definition at line 365 of file CCameraSensor.h.
◆ m_external_image_saver_count
|
private |
Number of working threads. Default:1, set to 2 in quad cores.
Definition at line 400 of file CCameraSensor.h.
◆ m_external_images_format
|
protectedinherited |
The extension ("jpg","gif","png",...) that determines the format of images saved externally.
- See also
- setPathForExternalImages
Definition at line 131 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_external_images_jpeg_quality
|
protectedinherited |
For JPEG images, the quality (default=95%).
Definition at line 132 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_external_images_own_thread
|
protected |
Whether to launch independent thread.
Definition at line 368 of file CCameraSensor.h.
◆ m_fcs_start_synch_capture
|
protected |
Definition at line 351 of file CCameraSensor.h.
◆ m_ffmpeg_url
|
protected |
Definition at line 326 of file CCameraSensor.h.
◆ m_flycap_options
|
protected |
Definition at line 348 of file CCameraSensor.h.
◆ m_flycap_stereo_options
|
protected |
Definition at line 352 of file CCameraSensor.h.
◆ m_grab_decimation
|
protectedinherited |
If set to N>=2, only 1 out of N observations will be saved to m_objList.
Definition at line 118 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_decimation_counter
|
protectedinherited |
Used when "m_grab_decimation" is enabled.
Definition at line 123 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grabber_type
|
protected |
Can be "opencv",...
Definition at line 301 of file CCameraSensor.h.
◆ m_hook_pre_save
|
private |
Definition at line 408 of file CCameraSensor.h.
◆ m_hook_pre_save_param
|
private |
Definition at line 409 of file CCameraSensor.h.
◆ m_img_dir_counter
|
protected |
Definition at line 362 of file CCameraSensor.h.
◆ m_img_dir_end_index
|
protected |
Definition at line 359 of file CCameraSensor.h.
◆ m_img_dir_is_stereo
|
protected |
Definition at line 361 of file CCameraSensor.h.
◆ m_img_dir_left_format
|
protected |
Definition at line 356 of file CCameraSensor.h.
◆ m_img_dir_right_format
|
protected |
Definition at line 357 of file CCameraSensor.h.
◆ m_img_dir_start_index
|
protected |
Definition at line 358 of file CCameraSensor.h.
◆ m_img_dir_url
|
protected |
Definition at line 355 of file CCameraSensor.h.
◆ m_kinect_save_3d
|
protected |
Save the 3D point cloud (default: true)
Definition at line 342 of file CCameraSensor.h.
◆ m_kinect_save_intensity_img
|
protected |
Save the 2D intensity image (default: true)
Definition at line 344 of file CCameraSensor.h.
◆ m_kinect_save_range_img
|
protected |
Save the 2D range image (default: true)
Definition at line 343 of file CCameraSensor.h.
◆ m_kinect_video_rgb
|
protected |
Save RGB or IR channels (default:true)
Definition at line 345 of file CCameraSensor.h.
◆ m_max_queue_len
|
protectedinherited |
See CGenericSensor.
Definition at line 117 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_objList
|
privateinherited |
The queue of objects to be returned by getObservations.
Definition at line 106 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), mrpt::hwdrivers::CGenericSensor::getObservations(), and mrpt::hwdrivers::CGenericSensor::~CGenericSensor().
◆ m_path_for_external_images
|
protectedinherited |
The path where to save off-rawlog images: empty means save images embedded in the rawlog.
Definition at line 130 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::setPathForExternalImages().
◆ m_preview_counter
|
private |
Definition at line 395 of file CCameraSensor.h.
◆ m_preview_decimation
|
protected |
Definition at line 313 of file CCameraSensor.h.
◆ m_preview_reduction
|
protected |
Definition at line 314 of file CCameraSensor.h.
◆ m_preview_win1
|
private |
Definition at line 396 of file CCameraSensor.h.
◆ m_preview_win2
|
private |
Normally we'll use only one window, but for stereo images we'll use two of them.
Definition at line 396 of file CCameraSensor.h.
◆ m_process_rate
|
protectedinherited |
See CGenericSensor.
Definition at line 116 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_rawlog_camera_sensor_label
|
protected |
Definition at line 330 of file CCameraSensor.h.
◆ m_rawlog_detected_images_dir
|
protected |
Definition at line 331 of file CCameraSensor.h.
◆ m_rawlog_file
|
protected |
Definition at line 329 of file CCameraSensor.h.
◆ m_sensorLabel
|
protectedinherited |
See CGenericSensor.
Definition at line 119 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CCANBusReader::CCANBusReader(), mrpt::hwdrivers::CGPSInterface::CGPSInterface(), mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::CHokuyoURG::CHokuyoURG(), mrpt::hwdrivers::CIMUIntersense::CIMUIntersense(), mrpt::hwdrivers::CIMUXSens::CIMUXSens(), mrpt::hwdrivers::CIMUXSens_MT4::CIMUXSens_MT4(), mrpt::hwdrivers::CKinect::CKinect(), mrpt::hwdrivers::CNationalInstrumentsDAQ::CNationalInstrumentsDAQ(), mrpt::hwdrivers::CRoboPeakLidar::CRoboPeakLidar(), mrpt::hwdrivers::CSickLaserSerial::CSickLaserSerial(), mrpt::hwdrivers::CSickLaserUSB::CSickLaserUSB(), mrpt::hwdrivers::CSkeletonTracker::CSkeletonTracker(), mrpt::hwdrivers::CSwissRanger3DCamera::CSwissRanger3DCamera(), mrpt::hwdrivers::CVelodyneScanner::CVelodyneScanner(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreview(), and mrpt::hwdrivers::CSkeletonTracker::processPreviewNone().
◆ m_sensorPose
|
protected |
Definition at line 299 of file CCameraSensor.h.
◆ m_sr_ip_address
|
protected |
Definition at line 335 of file CCameraSensor.h.
◆ m_sr_open_from_usb
|
protected |
true: USB, false: ETH
Definition at line 334 of file CCameraSensor.h.
◆ m_sr_save_3d
|
protected |
Save the 3D point cloud (default: true)
Definition at line 336 of file CCameraSensor.h.
◆ m_sr_save_confidence
|
protected |
Save the estimated confidence 2D image (default: false)
Definition at line 339 of file CCameraSensor.h.
◆ m_sr_save_intensity_img
|
protected |
Save the 2D intensity image (default: true)
Definition at line 338 of file CCameraSensor.h.
◆ m_sr_save_range_img
|
protected |
Save the 2D range image (default: true)
Definition at line 337 of file CCameraSensor.h.
◆ m_state
|
protectedinherited |
Definition at line 125 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CKinect::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), mrpt::hwdrivers::CIMUIntersense::initialize(), mrpt::hwdrivers::CIMUXSens::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CSkeletonTracker::initialize(), mrpt::hwdrivers::CVelodyneScanner::initialize(), mrpt::hwdrivers::CNationalInstrumentsDAQ::readFromDAQ(), and mrpt::hwdrivers::CIMUXSens::searchPortAndConnect().
◆ m_svs_camera_index
|
protected |
Definition at line 322 of file CCameraSensor.h.
◆ m_svs_options
|
protected |
Definition at line 323 of file CCameraSensor.h.
◆ m_threadImagesSaver
|
private |
Definition at line 401 of file CCameraSensor.h.
◆ m_threadImagesSaverShouldEnd
|
private |
Definition at line 403 of file CCameraSensor.h.
◆ m_toSaveList
|
private |
The queues of objects to be returned by getObservations, one for each working thread.
Definition at line 405 of file CCameraSensor.h.
◆ m_verbose
|
protectedinherited |
Definition at line 126 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::CGenericSensor(), mrpt::hwdrivers::CRoboPeakLidar::checkCOMMs(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CNTRIPEmitter::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CHokuyoURG::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CVelodyneScanner::internal_read_PCAP_packet(), mrpt::hwdrivers::CGPSInterface::JAVAD_sendMessage(), mrpt::hwdrivers::CGPSInterface::legacy_topcon_setup_commands(), mrpt::hwdrivers::CGPSInterface::OnConnectionEstablished(), mrpt::hwdrivers::CGPSInterface::OnConnectionShutdown(), mrpt::hwdrivers::CNationalInstrumentsDAQ::stop(), and mrpt::hwdrivers::CGPSInterface::tryToOpenTheCOM().