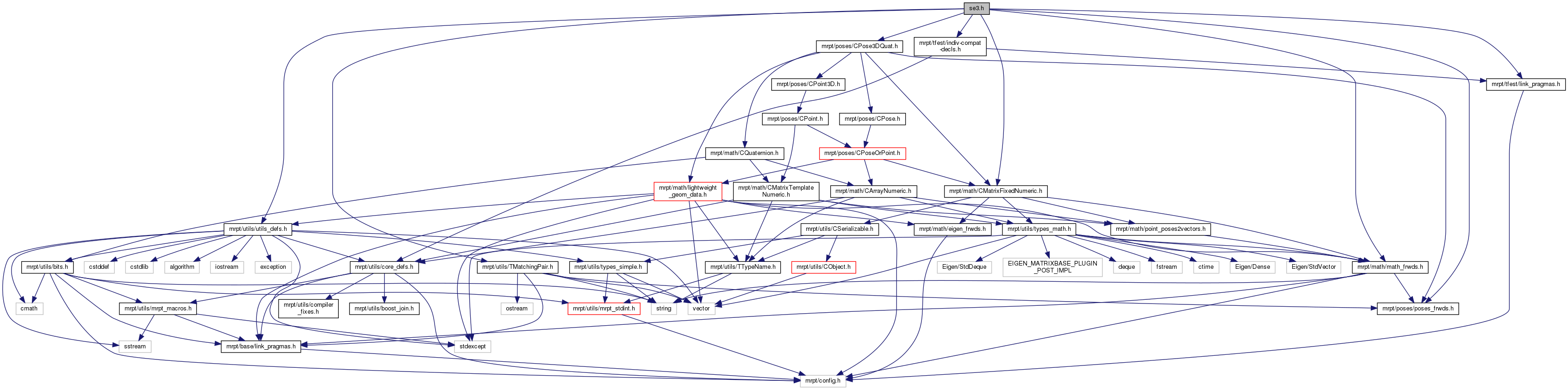
#include <mrpt/utils/utils_defs.h>#include <mrpt/math/math_frwds.h>#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/poses/CPose3DQuat.h>#include <mrpt/utils/TMatchingPair.h>#include <mrpt/tfest/link_pragmas.h>#include <mrpt/poses/poses_frwds.h>#include <mrpt/tfest/indiv-compat-decls.h>
Include dependency graph for se3.h:
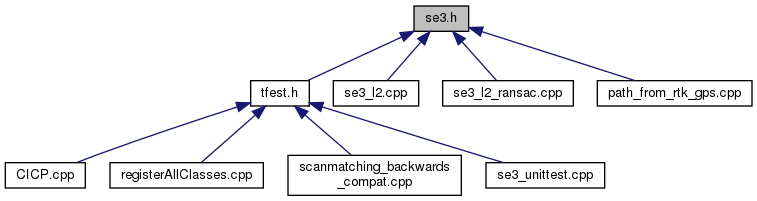
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::tfest::TSE3RobustParams |
| Parameters for se3_l2_robust(). More... | |
| struct | mrpt::tfest::TSE3RobustResult |
| Output placeholder for se3_l2_robust() More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::tfest | |
| Functions for estimating the optimal transformation between two frames of references given measurements of corresponding points. | |
Functions | |
| bool TFEST_IMPEXP | mrpt::tfest::se3_l2 (const mrpt::utils::TMatchingPairList &in_correspondences, mrpt::poses::CPose3DQuat &out_transform, double &out_scale, bool forceScaleToUnity=false) |
| Least-squares (L2 norm) solution to finding the optimal SE(3) transform between two reference frames using the "quaternion" or Horn's method: More... | |
| bool TFEST_IMPEXP | mrpt::tfest::se3_l2 (const std::vector< mrpt::math::TPoint3D > &in_points_this, const std::vector< mrpt::math::TPoint3D > &in_points_other, mrpt::poses::CPose3DQuat &out_transform, double &out_scale, bool forceScaleToUnity=false) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.This version accepts corresponding points as two vectors of TPoint3D (must have identical length). More... | |
| bool TFEST_IMPEXP | mrpt::tfest::se3_l2_robust (const mrpt::utils::TMatchingPairList &in_correspondences, const TSE3RobustParams &in_params, TSE3RobustResult &out_results) |
| Least-squares (L2 norm) solution to finding the optimal SE(3) transform between two reference frames using RANSAC and the "quaternion" or Horn's method: More... | |