#include <mrpt/utils/CSerializable.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/utils/CImage.h>#include <mrpt/utils/CDynamicGrid.h>#include <mrpt/maps/CMetricMap.h>#include <mrpt/utils/TMatchingPair.h>#include <mrpt/maps/CLogOddsGridMap2D.h>#include <mrpt/utils/safe_pointers.h>#include <mrpt/poses/poses_frwds.h>#include <mrpt/poses/CPosePDFGaussian.h>#include <mrpt/obs/CObservation2DRangeScanWithUncertainty.h>#include <mrpt/obs/obs_frwds.h>#include <limits>#include <mrpt/maps/link_pragmas.h>#include <mrpt/config.h>
Include dependency graph for maps/COccupancyGridMap2D.h:
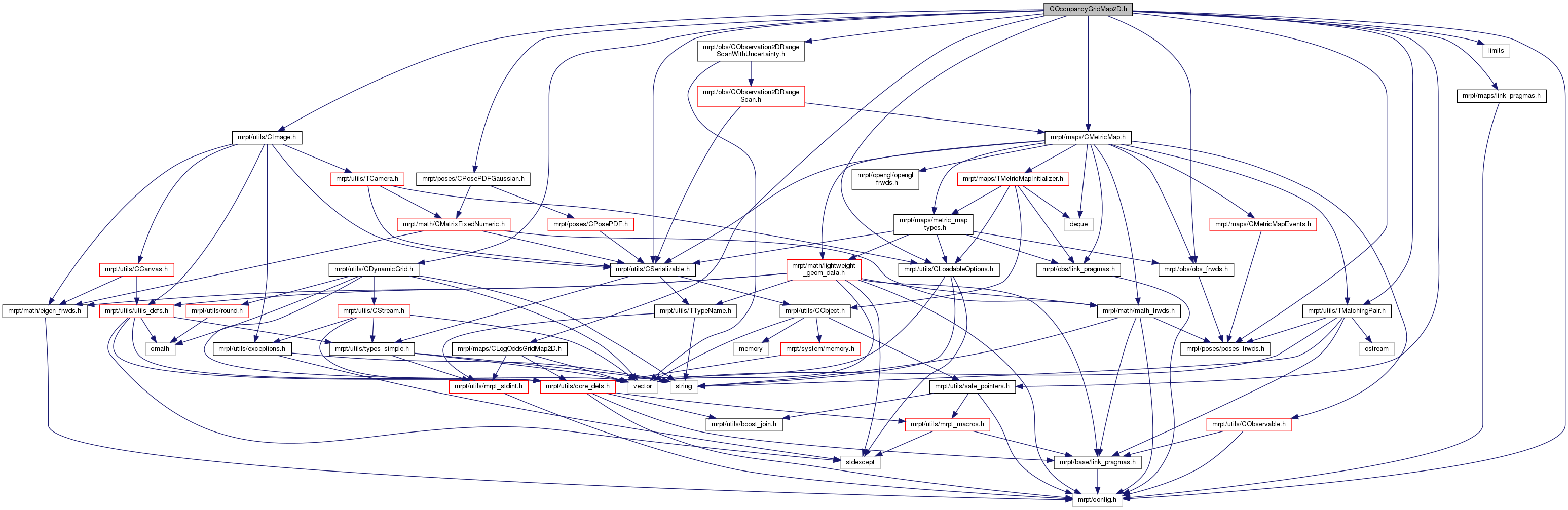
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::COccupancyGridMap2D |
| A class for storing an occupancy grid map. More... | |
| struct | mrpt::maps::COccupancyGridMap2D::TUpdateCellsInfoChangeOnly |
| An internal structure for storing data related to counting the new information apported by some observation. More... | |
| struct | mrpt::maps::COccupancyGridMap2D::TEntropyInfo |
| Used for returning entropy related information. More... | |
| class | mrpt::maps::COccupancyGridMap2D::TInsertionOptions |
| With this struct options are provided to the observation insertion process. More... | |
| class | mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions |
| With this struct options are provided to the observation likelihood computation process. More... | |
| class | mrpt::maps::COccupancyGridMap2D::TLikelihoodOutput |
| Some members of this struct will contain intermediate or output data after calling "computeObservationLikelihood" for some likelihood functions. More... | |
| struct | mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyParams |
| Input params for laserScanSimulatorWithUncertainty() More... | |
| struct | mrpt::maps::COccupancyGridMap2D::TLaserSimulUncertaintyResult |
| Output params for laserScanSimulatorWithUncertainty() More... | |
| struct | mrpt::maps::COccupancyGridMap2D::TCriticalPointsList |
| The structure used to store the set of Voronoi diagram critical points. More... | |
| struct | mrpt::maps::COccupancyGridMap2D::TMapDefinitionBase |
| struct | mrpt::maps::COccupancyGridMap2D::TMapDefinition |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, COccupancyGridMap2DPtr &pObj) |
| bool MAPS_IMPEXP | mrpt::maps::operator< (const COccupancyGridMap2D::TPairLikelihoodIndex &e1, const COccupancyGridMap2D::TPairLikelihoodIndex &e2) |