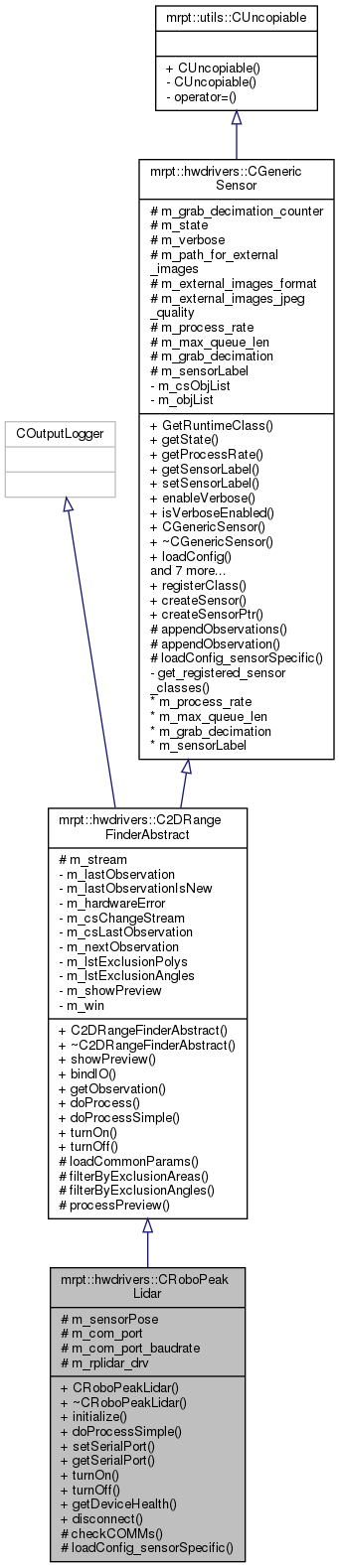
Detailed Description
Interfaces a Robo Peak LIDAR laser scanner.
See the example "samples/RoboPeakLidar_laser_test" and the application "rawlog-grabber" for a ready-to-use application to gather data from the scanner.
- Note
- Class introduced in MRPT 1.2.2
Definition at line 51 of file CRoboPeakLidar.h.
#include <mrpt/hwdrivers/CRoboPeakLidar.h>
Public Types | |
| enum | TSensorState { ssInitializing = 0 , ssWorking , ssError } |
| The current state of the sensor. More... | |
| typedef std::multimap< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObservations |
| typedef std::pair< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObsPair |
| typedef CGenericSensorPtr | Ptr |
| typedef stlplus::smart_ptr< const CGenericSensor > | ConstPtr |
Public Member Functions | |
| CRoboPeakLidar () | |
| Constructor. More... | |
| virtual | ~CRoboPeakLidar () |
| Destructor: turns the laser off. More... | |
| virtual void | initialize () |
| Attempts to connect and turns the laser on. Raises an exception on error. More... | |
| virtual void | doProcessSimple (bool &outThereIsObservation, mrpt::obs::CObservation2DRangeScan &outObservation, bool &hardwareError) |
| Specific laser scanner "software drivers" must process here new data from the I/O stream, and, if a whole scan has arrived, return it. More... | |
| void | setSerialPort (const std::string &port_name) |
| If set to non-empty, the serial port will be attempted to be opened automatically when this class is first used to request data from the laser. More... | |
| const std::string | getSerialPort () |
| Returns the currently set serial port. More... | |
| virtual bool | turnOn () |
| See base class docs. More... | |
| virtual bool | turnOff () |
| See base class docs. More... | |
| bool | getDeviceHealth () const |
| Returns true if the device is connected & operative. More... | |
| void | disconnect () |
| Closes the comms with the laser. Shouldn't have to be directly needed by the user. More... | |
| void | showPreview (bool enable=true) |
| Enables GUI visualization in real-time. More... | |
| void | bindIO (mrpt::utils::CStream *streamIO) |
| Binds the object to a given I/O channel. More... | |
| void | getObservation (bool &outThereIsObservation, mrpt::obs::CObservation2DRangeScan &outObservation, bool &hardwareError) |
| Get the last observation from the sensor, if available, and unmarks it as being "the last one" (thus a new scan must arrive or subsequent calls will find no new observations). More... | |
| void | doProcess () |
| Main method for a CGenericSensor. More... | |
| virtual const mrpt::hwdrivers::TSensorClassId * | GetRuntimeClass () const =0 |
| TSensorState | getState () const |
| The current state of the sensor More... | |
| double | getProcessRate () const |
| std::string | getSensorLabel () const |
| void | setSensorLabel (const std::string &sensorLabel) |
| void | enableVerbose (bool enabled=true) |
| Enable or disable extra debug info dumped to std::cout during sensor operation. More... | |
| bool | isVerboseEnabled () const |
| void | loadConfig (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| void | getObservations (TListObservations &lstObjects) |
| Returns a list of enqueued objects, emptying it (thread-safe). More... | |
| virtual void | setPathForExternalImages (const std::string &directory) |
| Set the path where to save off-rawlog image files (will be ignored in those sensors where this is not applicable). More... | |
| void | setExternalImageFormat (const std::string &ext) |
| Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg". More... | |
| void | setExternalImageJPEGQuality (const unsigned int quality) |
| The quality of JPEG compression, when external images is enabled and the format is "jpg". More... | |
| unsigned int | getExternalImageJPEGQuality () const |
Static Public Member Functions | |
| static void | registerClass (const TSensorClassId *pNewClass) |
| Register a class into the internal list of "CGenericSensor" descendents. More... | |
| static CGenericSensor * | createSensor (const std::string &className) |
| Creates a sensor by a name of the class. More... | |
| static CGenericSensorPtr | createSensorPtr (const std::string &className) |
| Just like createSensor, but returning a smart pointer to the newly created sensor object. More... | |
Protected Member Functions | |
| bool | checkCOMMs () |
| Returns true if communication has been established with the device. More... | |
| void | loadConfig_sensorSpecific (const mrpt::utils::CConfigFileBase &configSource, const std::string &iniSection) |
| See the class documentation at the top for expected parameters. More... | |
| void | loadCommonParams (const mrpt::utils::CConfigFileBase &configSource, const std::string &iniSection) |
| Should be call by derived classes at "loadConfig" (loads exclusion areas AND exclusion angles). More... | |
| void | filterByExclusionAreas (mrpt::obs::CObservation2DRangeScan &obs) const |
| Mark as invalid those points which (x,y) coordinates fall within the exclusion polygons. More... | |
| void | filterByExclusionAngles (mrpt::obs::CObservation2DRangeScan &obs) const |
| Mark as invalid those ranges in a set of forbiden angle ranges. More... | |
| void | processPreview (const mrpt::obs::CObservation2DRangeScan &obs) |
| Must be called inside the capture method to allow optional GUI preview of scans. More... | |
| void | appendObservations (const std::vector< mrpt::utils::CSerializablePtr > &obj) |
| This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations. More... | |
| void | appendObservation (const mrpt::utils::CSerializablePtr &obj) |
| Like appendObservations() but for just one observation. More... | |
Protected Attributes | |
| poses::CPose3D | m_sensorPose |
| The sensor 6D pose: More... | |
| std::string | m_com_port |
| int | m_com_port_baudrate |
| void * | m_rplidar_drv |
| utils::CStream * | m_stream |
| The I/O channel (will be NULL if not bound). More... | |
| size_t | m_grab_decimation_counter |
| Used when "m_grab_decimation" is enabled. More... | |
| TSensorState | m_state |
| bool | m_verbose |
| std::string | m_path_for_external_images |
| The path where to save off-rawlog images: empty means save images embedded in the rawlog. More... | |
| std::string | m_external_images_format |
| The extension ("jpg","gif","png",...) that determines the format of images saved externally. More... | |
| unsigned int | m_external_images_jpeg_quality |
| For JPEG images, the quality (default=95%). More... | |
Common settings to any sensor, loaded in "loadConfig" | |
| double | m_process_rate |
| See CGenericSensor. More... | |
| size_t | m_max_queue_len |
| See CGenericSensor. More... | |
| size_t | m_grab_decimation |
| If set to N>=2, only 1 out of N observations will be saved to m_objList. More... | |
| std::string | m_sensorLabel |
| See CGenericSensor. More... | |
Private Types | |
| typedef std::map< std::string, const TSensorClassId * > | registered_sensor_classes_t |
| Used in registerClass. More... | |
Static Private Member Functions | |
| static registered_sensor_classes_t & | get_registered_sensor_classes () |
| Access to singleton. More... | |
Private Attributes | |
| mrpt::obs::CObservation2DRangeScan | m_lastObservation |
| bool | m_lastObservationIsNew |
| bool | m_hardwareError |
| synch::CCriticalSection | m_csChangeStream |
| For being thread-safe. More... | |
| synch::CCriticalSection | m_csLastObservation |
| mrpt::obs::CObservation2DRangeScanPtr | m_nextObservation |
| A dynamic object used as buffer in doProcess. More... | |
| mrpt::obs::CObservation2DRangeScan::TListExclusionAreasWithRanges | m_lstExclusionPolys |
| A list of optional exclusion polygons, in coordinates relative to the vehicle, that is, taking into account the "sensorPose". More... | |
| std::vector< std::pair< double, double > > | m_lstExclusionAngles |
| A list of pairs of angles <init,end> such as all sensor ranges falling in those forbiden angles will be marked as invalid. More... | |
| bool | m_showPreview |
| If true, shows a 3D window with a preview of the grabber data. More... | |
| mrpt::gui::CDisplayWindow3DPtr | m_win |
| synch::CCriticalSection | m_csObjList |
| The critical section for m_objList. More... | |
| TListObservations | m_objList |
| The queue of objects to be returned by getObservations. More... | |
Member Typedef Documentation
◆ ConstPtr
|
inherited |
Definition at line 103 of file CGenericSensor.h.
◆ Ptr
|
inherited |
Definition at line 102 of file CGenericSensor.h.
◆ registered_sensor_classes_t
|
privateinherited |
Used in registerClass.
Definition at line 109 of file CGenericSensor.h.
◆ TListObservations
|
inherited |
Definition at line 68 of file CGenericSensor.h.
◆ TListObsPair
|
inherited |
Definition at line 69 of file CGenericSensor.h.
Member Enumeration Documentation
◆ TSensorState
|
inherited |
The current state of the sensor.
- See also
- CGenericSensor::getState
| Enumerator | |
|---|---|
| ssInitializing | |
| ssWorking | |
| ssError | |
Definition at line 74 of file CGenericSensor.h.
Constructor & Destructor Documentation
◆ CRoboPeakLidar()
| CRoboPeakLidar::CRoboPeakLidar | ( | ) |
Constructor.
Definition at line 36 of file CRoboPeakLidar.cpp.
References mrpt::hwdrivers::CGenericSensor::m_sensorLabel.
◆ ~CRoboPeakLidar()
|
virtual |
Destructor: turns the laser off.
Definition at line 47 of file CRoboPeakLidar.cpp.
References disconnect(), and turnOff().
Member Function Documentation
◆ appendObservation()
|
inlineprotectedinherited |
Like appendObservations() but for just one observation.
Definition at line 147 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CCANBusReader::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), and mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow().
◆ appendObservations()
|
protectedinherited |
This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations.
Passed objects must be created in dynamic memory and a smart pointer passed. Example of creation:
If several observations are passed at once in the vector, they'll be considered as a block regarding the grabbing decimation factor.
Definition at line 53 of file CGenericSensor.cpp.
References CLASS_ID, mrpt::hwdrivers::CGenericSensor::m_csObjList, mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_objList, and THROW_EXCEPTION.
Referenced by mrpt::hwdrivers::CKinect::doProcess(), and mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess().
◆ bindIO()
|
inherited |
Binds the object to a given I/O channel.
The stream object must not be deleted before the destruction of this class.
- See also
- hwdrivers::CSerialPort
Definition at line 46 of file C2DRangeFinderAbstract.cpp.
References mrpt::synch::CCriticalSection::enter(), mrpt::synch::CCriticalSection::leave(), mrpt::hwdrivers::C2DRangeFinderAbstract::m_csChangeStream, and mrpt::hwdrivers::C2DRangeFinderAbstract::m_stream.
Referenced by mrpt::hwdrivers::CHokuyoURG::ensureStreamIsOpen().
◆ checkCOMMs()
|
protected |
Returns true if communication has been established with the device.
If it's not, try to create a comms channel.
- Returns
- false on error.
Definition at line 252 of file CRoboPeakLidar.cpp.
References ASSERTMSG_, mrpt::system::os::fprintf(), getDeviceHealth(), IS_FAIL, m_com_port, m_com_port_baudrate, m_rplidar_drv, mrpt::hwdrivers::CGenericSensor::m_verbose, MRPT_END, MRPT_START, and THROW_EXCEPTION.
Referenced by doProcessSimple(), initialize(), and turnOn().
◆ createSensor()
|
staticinherited |
Creates a sensor by a name of the class.
Typically the user may want to create a smart pointer around the returned pointer, whis is made with:
- Returns
- A pointer to a new class, or NULL if class name is unknown.
Definition at line 103 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
◆ createSensorPtr()
|
inlinestaticinherited |
Just like createSensor, but returning a smart pointer to the newly created sensor object.
Definition at line 180 of file CGenericSensor.h.
◆ disconnect()
| void CRoboPeakLidar::disconnect | ( | ) |
Closes the comms with the laser. Shouldn't have to be directly needed by the user.
Definition at line 53 of file CRoboPeakLidar.cpp.
References m_rplidar_drv.
Referenced by doProcessSimple(), and ~CRoboPeakLidar().
◆ doProcess()
|
virtualinherited |
Main method for a CGenericSensor.
Implements mrpt::hwdrivers::CGenericSensor.
Reimplemented in mrpt::hwdrivers::CLMS100Eth.
Definition at line 75 of file C2DRangeFinderAbstract.cpp.
References mrpt::hwdrivers::CGenericSensor::appendObservation(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcessSimple(), mrpt::hwdrivers::C2DRangeFinderAbstract::m_nextObservation, mrpt::hwdrivers::CGenericSensor::m_state, mrpt::hwdrivers::CGenericSensor::ssError, mrpt::hwdrivers::CGenericSensor::ssWorking, and THROW_EXCEPTION.
◆ doProcessSimple()
|
virtual |
Specific laser scanner "software drivers" must process here new data from the I/O stream, and, if a whole scan has arrived, return it.
This method MUST BE CALLED in a timely fashion by the user to allow the proccessing of incoming data. It can be run in a different thread safely.
Implements mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 64 of file CRoboPeakLidar.cpp.
References angle_q6_checkbit, mrpt::obs::CObservation2DRangeScan::aperture, checkCOMMs(), disconnect(), distance_q2, mrpt::hwdrivers::C2DRangeFinderAbstract::filterByExclusionAngles(), mrpt::hwdrivers::C2DRangeFinderAbstract::filterByExclusionAreas(), M_PIf, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, m_sensorPose, mrpt::obs::CObservation2DRangeScan::maxRange, mrpt::system::now(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::obs::CObservation2DRangeScan::resizeScanAndAssign(), RESULT_OK, RESULT_OPERATION_FAIL, RESULT_OPERATION_TIMEOUT, mrpt::obs::CObservation2DRangeScan::rightToLeft, RPLIDAR_RESP_MEASUREMENT_ANGLE_SHIFT, mrpt::obs::CObservation::sensorLabel, mrpt::obs::CObservation2DRangeScan::sensorPose, mrpt::obs::CObservation2DRangeScan::setScanRange(), mrpt::obs::CObservation2DRangeScan::setScanRangeValidity(), mrpt::obs::CObservation2DRangeScan::stdError, and mrpt::obs::CObservation::timestamp.
◆ enableVerbose()
|
inlineinherited |
Enable or disable extra debug info dumped to std::cout during sensor operation.
Default: disabled unless the environment variable "MRPT_HWDRIVERS_VERBOSE" is set to "1" during object creation.
Definition at line 92 of file CGenericSensor.h.
◆ filterByExclusionAngles()
|
protectedinherited |
Mark as invalid those ranges in a set of forbiden angle ranges.
- See also
- loadExclusionAreas
Definition at line 174 of file C2DRangeFinderAbstract.cpp.
References mrpt::obs::CObservation2DRangeScan::filterByExclusionAngles(), and mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionAngles.
Referenced by mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), and mrpt::hwdrivers::CSickLaserUSB::doProcessSimple().
◆ filterByExclusionAreas()
|
protectedinherited |
Mark as invalid those points which (x,y) coordinates fall within the exclusion polygons.
- See also
- loadExclusionAreas
Definition at line 166 of file C2DRangeFinderAbstract.cpp.
References mrpt::obs::CObservation2DRangeScan::filterByExclusionAreas(), and mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionPolys.
Referenced by mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), and mrpt::hwdrivers::CSickLaserUSB::doProcessSimple().
◆ get_registered_sensor_classes()
|
staticprivateinherited |
Access to singleton.
Definition at line 111 of file CGenericSensor.cpp.
Referenced by mrpt::hwdrivers::CGenericSensor::createSensor(), and mrpt::hwdrivers::CGenericSensor::registerClass().
◆ getDeviceHealth()
| bool CRoboPeakLidar::getDeviceHealth | ( | ) | const |
Returns true if the device is connected & operative.
Definition at line 218 of file CRoboPeakLidar.cpp.
References mrpt::system::os::fprintf(), IS_OK, RPLIDAR_STATUS_OK, and THROW_EXCEPTION.
Referenced by checkCOMMs().
◆ getExternalImageJPEGQuality()
|
inlineinherited |
Definition at line 234 of file CGenericSensor.h.
◆ getObservation()
|
inherited |
Get the last observation from the sensor, if available, and unmarks it as being "the last one" (thus a new scan must arrive or subsequent calls will find no new observations).
Definition at line 56 of file C2DRangeFinderAbstract.cpp.
References mrpt::synch::CCriticalSection::enter(), mrpt::synch::CCriticalSection::leave(), mrpt::hwdrivers::C2DRangeFinderAbstract::m_csLastObservation, mrpt::hwdrivers::C2DRangeFinderAbstract::m_hardwareError, mrpt::hwdrivers::C2DRangeFinderAbstract::m_lastObservation, and mrpt::hwdrivers::C2DRangeFinderAbstract::m_lastObservationIsNew.
◆ getObservations()
|
inherited |
Returns a list of enqueued objects, emptying it (thread-safe).
The objects must be freed by the invoker.
Definition at line 90 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::m_csObjList, and mrpt::hwdrivers::CGenericSensor::m_objList.
◆ getProcessRate()
|
inlineinherited |
Definition at line 84 of file CGenericSensor.h.
◆ GetRuntimeClass()
|
pure virtualinherited |
◆ getSensorLabel()
|
inlineinherited |
Definition at line 86 of file CGenericSensor.h.
◆ getSerialPort()
|
inline |
Returns the currently set serial port.
- See also
- setSerialPort
Definition at line 68 of file CRoboPeakLidar.h.
◆ getState()
|
inlineinherited |
The current state of the sensor
Definition at line 82 of file CGenericSensor.h.
◆ initialize()
Attempts to connect and turns the laser on. Raises an exception on error.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 325 of file CRoboPeakLidar.cpp.
References checkCOMMs(), and turnOn().
◆ isVerboseEnabled()
|
inlineinherited |
Definition at line 93 of file CGenericSensor.h.
◆ loadCommonParams()
|
protectedinherited |
Should be call by derived classes at "loadConfig" (loads exclusion areas AND exclusion angles).
This loads a sequence of vertices of a polygon given by its (x,y) coordinates relative to the vehicle, that is, taking into account the "sensorPose".
- exclusionZoneu_x
- exclusionZoneu_y for u=1,2,3,... All points within the 2D polygon will be ignored, for any Z, unless an optional entry is found:
- exclusionZoneu_z=[z_min z_max] In that case, only the points within the 2D polygon AND the given range in Z will be ignored.
The number of zones is variable, but they must start at 1 and be consecutive.
This also loads any other common params (e.g. 'preview')
- See also
- filterByExclusionAreas
Definition at line 102 of file C2DRangeFinderAbstract.cpp.
References ASSERT_, ASSERTMSG_, DEG2RAD, mrpt::format(), mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionAngles, mrpt::hwdrivers::C2DRangeFinderAbstract::m_lstExclusionPolys, M_PI, mrpt::hwdrivers::C2DRangeFinderAbstract::m_showPreview, mrpt::utils::CConfigFileBase::read_bool(), mrpt::utils::CConfigFileBase::read_double(), and mrpt::utils::CConfigFileBase::read_vector().
Referenced by mrpt::hwdrivers::CHokuyoURG::loadConfig_sensorSpecific(), loadConfig_sensorSpecific(), mrpt::hwdrivers::CSickLaserSerial::loadConfig_sensorSpecific(), and mrpt::hwdrivers::CSickLaserUSB::loadConfig_sensorSpecific().
◆ loadConfig()
|
inherited |
Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 131 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_max_queue_len, mrpt::hwdrivers::CGenericSensor::m_process_rate, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, MRPT_END, MRPT_START, mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
◆ loadConfig_sensorSpecific()
|
protectedvirtual |
See the class documentation at the top for expected parameters.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 163 of file CRoboPeakLidar.cpp.
References DEG2RAD, mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams(), m_com_port, m_sensorPose, mrpt::utils::CConfigFileBase::read_float(), mrpt::utils::CConfigFileBase::read_string(), and mrpt::poses::CPose3D::setFromValues().
◆ processPreview()
|
protectedinherited |
Must be called inside the capture method to allow optional GUI preview of scans.
Definition at line 180 of file C2DRangeFinderAbstract.cpp.
References mrpt::gui::CDisplayWindow3D::Create(), mrpt::opengl::CPlanarLaserScan::Create(), mrpt::hwdrivers::CGenericSensor::m_sensorLabel, mrpt::hwdrivers::C2DRangeFinderAbstract::m_showPreview, and mrpt::hwdrivers::C2DRangeFinderAbstract::m_win.
Referenced by mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), and mrpt::hwdrivers::CSickLaserUSB::doProcessSimple().
◆ registerClass()
|
staticinherited |
Register a class into the internal list of "CGenericSensor" descendents.
Used internally in the macros DEFINE_GENERIC_SENSOR, etc...
Can be used as "CGenericSensor::registerClass( SENSOR_CLASS_ID(CMySensor) );" if building custom sensors outside mrpt libraries in user code.
Definition at line 120 of file CGenericSensor.cpp.
References mrpt::hwdrivers::TSensorClassId::className, and mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR::CLASSINIT_GENERIC_SENSOR().
◆ setExternalImageFormat()
|
inlineinherited |
Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg".
Definition at line 226 of file CGenericSensor.h.
◆ setExternalImageJPEGQuality()
|
inlineinherited |
The quality of JPEG compression, when external images is enabled and the format is "jpg".
- See also
- setExternalImageFormat
Definition at line 231 of file CGenericSensor.h.
References quality.
◆ setPathForExternalImages()
|
inlinevirtualinherited |
Set the path where to save off-rawlog image files (will be ignored in those sensors where this is not applicable).
An empty string (the default value at construction) means to save images embedded in the rawlog, instead of on separate files.
- Exceptions
-
std::exception If the directory doesn't exists and cannot be created.
Reimplemented in mrpt::hwdrivers::CSwissRanger3DCamera, mrpt::hwdrivers::COpenNI2Sensor, mrpt::hwdrivers::COpenNI2_RGBD360, mrpt::hwdrivers::CKinect, and mrpt::hwdrivers::CCameraSensor.
Definition at line 217 of file CGenericSensor.h.
References MRPT_UNUSED_PARAM.
◆ setSensorLabel()
|
inlineinherited |
Definition at line 87 of file CGenericSensor.h.
◆ setSerialPort()
| void CRoboPeakLidar::setSerialPort | ( | const std::string & | port_name | ) |
If set to non-empty, the serial port will be attempted to be opened automatically when this class is first used to request data from the laser.
Definition at line 334 of file CRoboPeakLidar.cpp.
References m_com_port, m_rplidar_drv, and THROW_EXCEPTION.
◆ showPreview()
|
inlineinherited |
Enables GUI visualization in real-time.
Definition at line 95 of file C2DRangeFinderAbstract.h.
◆ turnOff()
|
virtual |
See base class docs.
Implements mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 204 of file CRoboPeakLidar.cpp.
References THROW_EXCEPTION.
Referenced by ~CRoboPeakLidar().
◆ turnOn()
|
virtual |
See base class docs.
Implements mrpt::hwdrivers::C2DRangeFinderAbstract.
Definition at line 189 of file CRoboPeakLidar.cpp.
References checkCOMMs(), and THROW_EXCEPTION.
Referenced by initialize().
Member Data Documentation
◆ m_com_port
|
protected |
Definition at line 80 of file CRoboPeakLidar.h.
Referenced by checkCOMMs(), loadConfig_sensorSpecific(), and setSerialPort().
◆ m_com_port_baudrate
|
protected |
Definition at line 81 of file CRoboPeakLidar.h.
Referenced by checkCOMMs().
◆ m_csChangeStream
|
privateinherited |
For being thread-safe.
Definition at line 47 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::bindIO().
◆ m_csLastObservation
|
privateinherited |
Definition at line 47 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_csObjList
|
privateinherited |
The critical section for m_objList.
Definition at line 105 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::getObservations().
◆ m_external_images_format
|
protectedinherited |
The extension ("jpg","gif","png",...) that determines the format of images saved externally.
- See also
- setPathForExternalImages
Definition at line 131 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_external_images_jpeg_quality
|
protectedinherited |
For JPEG images, the quality (default=95%).
Definition at line 132 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_grab_decimation
|
protectedinherited |
If set to N>=2, only 1 out of N observations will be saved to m_objList.
Definition at line 118 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_decimation_counter
|
protectedinherited |
Used when "m_grab_decimation" is enabled.
Definition at line 123 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_hardwareError
|
privateinherited |
Definition at line 43 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_lastObservation
|
privateinherited |
Definition at line 41 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_lastObservationIsNew
|
privateinherited |
Definition at line 42 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::getObservation().
◆ m_lstExclusionAngles
|
privateinherited |
A list of pairs of angles <init,end> such as all sensor ranges falling in those forbiden angles will be marked as invalid.
Definition at line 52 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::filterByExclusionAngles(), and mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams().
◆ m_lstExclusionPolys
|
privateinherited |
A list of optional exclusion polygons, in coordinates relative to the vehicle, that is, taking into account the "sensorPose".
Definition at line 51 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::filterByExclusionAreas(), and mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams().
◆ m_max_queue_len
|
protectedinherited |
See CGenericSensor.
Definition at line 117 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_nextObservation
|
privateinherited |
A dynamic object used as buffer in doProcess.
Definition at line 49 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess().
◆ m_objList
|
privateinherited |
The queue of objects to be returned by getObservations.
Definition at line 106 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), mrpt::hwdrivers::CGenericSensor::getObservations(), and mrpt::hwdrivers::CGenericSensor::~CGenericSensor().
◆ m_path_for_external_images
|
protectedinherited |
The path where to save off-rawlog images: empty means save images embedded in the rawlog.
Definition at line 130 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::setPathForExternalImages().
◆ m_process_rate
|
protectedinherited |
See CGenericSensor.
Definition at line 116 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_rplidar_drv
|
protected |
Definition at line 82 of file CRoboPeakLidar.h.
Referenced by checkCOMMs(), disconnect(), and setSerialPort().
◆ m_sensorLabel
|
protectedinherited |
See CGenericSensor.
Definition at line 119 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CCANBusReader::CCANBusReader(), mrpt::hwdrivers::CGPSInterface::CGPSInterface(), mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::CHokuyoURG::CHokuyoURG(), mrpt::hwdrivers::CIMUIntersense::CIMUIntersense(), mrpt::hwdrivers::CIMUXSens::CIMUXSens(), mrpt::hwdrivers::CIMUXSens_MT4::CIMUXSens_MT4(), mrpt::hwdrivers::CKinect::CKinect(), mrpt::hwdrivers::CNationalInstrumentsDAQ::CNationalInstrumentsDAQ(), CRoboPeakLidar(), mrpt::hwdrivers::CSickLaserSerial::CSickLaserSerial(), mrpt::hwdrivers::CSickLaserUSB::CSickLaserUSB(), mrpt::hwdrivers::CSkeletonTracker::CSkeletonTracker(), mrpt::hwdrivers::CSwissRanger3DCamera::CSwissRanger3DCamera(), mrpt::hwdrivers::CVelodyneScanner::CVelodyneScanner(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreview(), and mrpt::hwdrivers::CSkeletonTracker::processPreviewNone().
◆ m_sensorPose
|
protected |
The sensor 6D pose:
Definition at line 79 of file CRoboPeakLidar.h.
Referenced by doProcessSimple(), and loadConfig_sensorSpecific().
◆ m_showPreview
|
privateinherited |
If true, shows a 3D window with a preview of the grabber data.
Definition at line 54 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::loadCommonParams(), and mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview().
◆ m_state
|
protectedinherited |
Definition at line 125 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CKinect::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), mrpt::hwdrivers::CIMUIntersense::initialize(), mrpt::hwdrivers::CIMUXSens::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CSkeletonTracker::initialize(), mrpt::hwdrivers::CVelodyneScanner::initialize(), mrpt::hwdrivers::CNationalInstrumentsDAQ::readFromDAQ(), and mrpt::hwdrivers::CIMUXSens::searchPortAndConnect().
◆ m_stream
|
protectedinherited |
The I/O channel (will be NULL if not bound).
Definition at line 58 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::CHokuyoURG::assureBufferHasBytes(), mrpt::hwdrivers::C2DRangeFinderAbstract::bindIO(), mrpt::hwdrivers::CHokuyoURG::ensureStreamIsOpen(), mrpt::hwdrivers::CSickLaserSerial::LMS_endContinuousMode(), mrpt::hwdrivers::CSickLaserSerial::LMS_sendMeasuringMode_cm_mm(), mrpt::hwdrivers::CSickLaserSerial::LMS_setupBaudrate(), mrpt::hwdrivers::CSickLaserSerial::LMS_setupSerialComms(), mrpt::hwdrivers::CSickLaserSerial::LMS_startContinuousMode(), mrpt::hwdrivers::CSickLaserSerial::LMS_statusQuery(), mrpt::hwdrivers::CSickLaserSerial::LMS_waitACK(), mrpt::hwdrivers::CSickLaserSerial::LMS_waitIncomingFrame(), mrpt::hwdrivers::CHokuyoURG::purgeBuffers(), mrpt::hwdrivers::CHokuyoURG::sendCmd(), mrpt::hwdrivers::CSickLaserSerial::SendCommandToSICK(), mrpt::hwdrivers::CSickLaserSerial::tryToOpenComms(), mrpt::hwdrivers::CHokuyoURG::turnOn(), mrpt::hwdrivers::CSickLaserSerial::waitContinuousSampleFrame(), mrpt::hwdrivers::CHokuyoURG::~CHokuyoURG(), and mrpt::hwdrivers::CSickLaserSerial::~CSickLaserSerial().
◆ m_verbose
|
protectedinherited |
Definition at line 126 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::CGenericSensor(), checkCOMMs(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CNTRIPEmitter::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CHokuyoURG::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CVelodyneScanner::internal_read_PCAP_packet(), mrpt::hwdrivers::CGPSInterface::JAVAD_sendMessage(), mrpt::hwdrivers::CGPSInterface::legacy_topcon_setup_commands(), mrpt::hwdrivers::CGPSInterface::OnConnectionEstablished(), mrpt::hwdrivers::CGPSInterface::OnConnectionShutdown(), mrpt::hwdrivers::CNationalInstrumentsDAQ::stop(), and mrpt::hwdrivers::CGPSInterface::tryToOpenTheCOM().
◆ m_win
|
privateinherited |
Definition at line 55 of file C2DRangeFinderAbstract.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview().