Detailed Description
A class for grabing "range images", intensity images (either RGB or IR) and other information from an Xbox Kinect sensor.
To use Kinect for Windows or ASUS/Primesense RGBD cameras, use the class COpenNI2.
Configuration and usage:
Data is returned as observations of type mrpt::obs::CObservation3DRangeScan (and mrpt::obs::CObservationIMU for accelerometers data). See those classes for documentation on their fields.
As with any other CGenericSensor class, the normal sequence of methods to be called is:
- CGenericSensor::loadConfig() - Or calls to the individual setXXX() to configure the sensor parameters.
- CKinect::initialize() - to start the communication with the sensor.
- call CKinect::getNextObservation() for getting the data.
Calibration parameters
For an accurate transformation of depth images to 3D points, you'll have to calibrate your Kinect, and supply the following threee pieces of information (default calibration data will be used otherwise, but they'll be not optimal for all sensors!):
- Camera parameters for the RGB camera. See CKinect::setCameraParamsIntensity()
- Camera parameters for the depth camera. See CKinect::setCameraParamsDepth()
- The 3D relative pose of the two cameras. See CKinect::setRelativePoseIntensityWrtDepth()
See http://www.mrpt.org/Kinect_calibration for a procedure to calibrate Kinect sensors with an interactive GUI program.
Coordinates convention
The origin of coordinates is the focal point of the depth camera, with the axes oriented as in the diagram shown in mrpt::obs::CObservation3DRangeScan. Notice in that picture that the RGB camera is assumed to have axes as usual in computer vision, which differ from those for the depth camera.
The X,Y,Z axes used to report the data from accelerometers coincide with those of the depth camera (e.g. the camera standing on a table would have an ACC_Z=-9.8m/s2).
Notice however that, for consistency with stereo cameras, when loading the calibration parameters from a configuration file, the left-to-right pose increment is expected as if both RGB & IR cameras had their +Z axes pointing forward, +X to the right, +Y downwards (just like it's the standard in stereo cameras and in computer vision literature). In other words: the pose stored in this class uses a different axes convention for the depth camera than in a stereo camera, so when a pose L2R is loaded from a calibration file it's actually converted like:
L2R(this class convention) = CPose3D(0,0,0,-90deg,0deg,-90deg) (+) L2R(in the config file)
Some general comments
- Depth is grabbed in 10bit depth, and a range N it's converted to meters as: range(m) = 0.1236 * tan(N/2842.5 + 1.1863)
- This sensor can be also used from within rawlog-grabber to grab datasets within a robot with more sensors.
- There is no built-in threading support, so if you use this class manually (not with-in rawlog-grabber), the ideal would be to create a thread and continuously request data from that thread (see mrpt::system::createThread ).
- The intensity channel default to the RGB images, but it can be changed with setVideoChannel() to read the IR camera images (useful for calibrating).
- There is a built-in support for an optional preview of the data on a window, so you don't need to even worry on creating a window to show them.
- This class relies on an embedded version of libfreenect (you do NOT need to install it in your system). Thanks guys for the great job!
Converting to 3D point cloud
You can convert the 3D observation into a 3D point cloud with this piece of code:
Then the point cloud mrpt::maps::CColouredPointsMap can be converted into an OpenGL object for rendering with mrpt::maps::CMetricMap::getAs3DObject() or alternatively with:
Raw depth to range conversion
At construction, this class builds an internal array for converting raw 10 or 11bit depths into ranges in meters. Users can read that array or modify it (if you have a better calibration, for example) by calling CKinect::getRawDepth2RangeConversion(). If you replace it, remember to set the first and last entries (index 0 and KINECT_RANGES_TABLE_LEN-1) to zero, to indicate that those are invalid ranges.
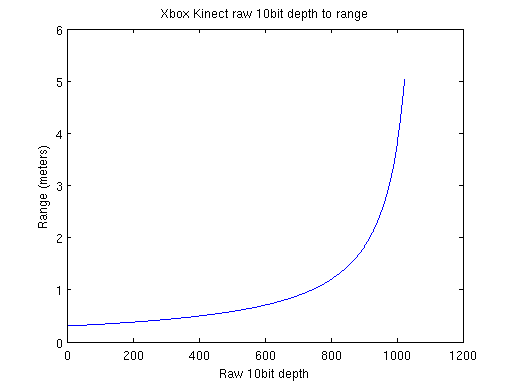 R(d) = k3 * tan(d/k2 + k1); k1 = 1.1863, k2 = 2842.5, k3 = 0.1236 |
Platform-specific comments
For more details, refer to libfreenect documentation:
- Linux: You'll need root privileges to access Kinect. Or, install
MRPT/scripts/51-kinect.rulesin/etc/udev/rules.d/to allow access to all users. - Windows:
- Since MRPT 0.9.4 you'll only need to install libusb-win32: download and extract the latest libusb-win32-bin-x.x.x.x.zip
- To install the drivers, read this: http://openkinect.org/wiki/Getting_Started#Windows
- MacOS: (write me!)
Format of parameters for loading from a .ini file
More references to read:
#include <mrpt/hwdrivers/CKinect.h>

Public Types | |
| enum | TVideoChannel { VIDEO_CHANNEL_RGB =0 , VIDEO_CHANNEL_IR } |
| RGB or IR video channel identifiers. More... | |
| typedef float | TDepth2RangeArray[KINECT_RANGES_TABLE_LEN] |
| A typedef for an array that converts raw depth to ranges in meters. More... | |
| enum | TSensorState { ssInitializing = 0 , ssWorking , ssError } |
| The current state of the sensor. More... | |
| typedef std::multimap< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObservations |
| typedef std::pair< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObsPair |
| typedef CGenericSensorPtr | Ptr |
| typedef std::shared_ptr< const CGenericSensor > | ConstPtr |
Public Member Functions | |
| CKinect () | |
| Default ctor. More... | |
| ~CKinect () | |
| Default ctor. More... | |
| virtual void | initialize () |
| Initializes the 3D camera - should be invoked after calling loadConfig() or setting the different parameters with the set*() methods. More... | |
| virtual void | doProcess () |
| To be called at a high rate (>XX Hz), this method populates the internal buffer of received observations. More... | |
| void | getNextObservation (mrpt::obs::CObservation3DRangeScan &out_obs, bool &there_is_obs, bool &hardware_error) |
| The main data retrieving function, to be called after calling loadConfig() and initialize(). More... | |
| void | getNextObservation (mrpt::obs::CObservation3DRangeScan &out_obs, mrpt::obs::CObservationIMU &out_obs_imu, bool &there_is_obs, bool &hardware_error) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual void | setPathForExternalImages (const std::string &directory) |
| Set the path where to save off-rawlog image files (this class DOES take into account this path). More... | |
| virtual const mrpt::hwdrivers::TSensorClassId * | GetRuntimeClass () const =0 |
| TSensorState | getState () const |
| The current state of the sensor More... | |
| double | getProcessRate () const |
| std::string | getSensorLabel () const |
| void | setSensorLabel (const std::string &sensorLabel) |
| void | enableVerbose (bool enabled=true) |
| Enable or disable extra debug info dumped to std::cout during sensor operation. More... | |
| bool | isVerboseEnabled () const |
| void | loadConfig (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| void | getObservations (TListObservations &lstObjects) |
| Returns a list of enqueued objects, emptying it (thread-safe). More... | |
| void | setExternalImageFormat (const std::string &ext) |
| Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg". More... | |
| void | setExternalImageJPEGQuality (const unsigned int quality) |
| The quality of JPEG compression, when external images is enabled and the format is "jpg". More... | |
| unsigned int | getExternalImageJPEGQuality () const |
Sensor parameters (alternative to \a loadConfig ) and manual control | |
| void | open () |
| Try to open the camera (set all the parameters before calling this) - users may also call initialize(), which in turn calls this method. More... | |
| bool | isOpen () const |
| Whether there is a working connection to the sensor. More... | |
| void | close () |
| Close the Connection to the sensor (not need to call it manually unless desired for some reason, since it's called at destructor) More... | |
| void | setVideoChannel (const TVideoChannel vch) |
| Changes the video channel to open (RGB or IR) - you can call this method before start grabbing or in the middle of streaming and the video source will change on the fly. More... | |
| TVideoChannel | getVideoChannel () const |
| Return the current video channel (RGB or IR) More... | |
| void | setDeviceIndexToOpen (int index) |
| Set the sensor index to open (if there're several sensors attached to the computer); default=0 -> the first one. More... | |
| int | getDeviceIndexToOpen () const |
| void | setTiltAngleDegrees (double angle) |
| Change tilt angle. More... | |
| double | getTiltAngleDegrees () |
| void | enablePreviewRGB (bool enable=true) |
| Default: disabled. More... | |
| void | disablePreviewRGB () |
| bool | isPreviewRGBEnabled () const |
| void | setPreviewDecimation (size_t decimation_factor) |
| If preview is enabled, show only one image out of N (default: 1=show all) More... | |
| size_t | getPreviewDecimation () const |
| double | getMaxRange () const |
| Get the maximum range (meters) that can be read in the observation field "rangeImage". More... | |
| size_t | getRowCount () const |
| Get the row count in the camera images, loaded automatically upon camera open(). More... | |
| size_t | getColCount () const |
| Get the col count in the camera images, loaded automatically upon camera open(). More... | |
| const mrpt::utils::TCamera & | getCameraParamsIntensity () const |
| Get a const reference to the depth camera calibration parameters. More... | |
| void | setCameraParamsIntensity (const mrpt::utils::TCamera &p) |
| const mrpt::utils::TCamera & | getCameraParamsDepth () const |
| Get a const reference to the depth camera calibration parameters. More... | |
| void | setCameraParamsDepth (const mrpt::utils::TCamera &p) |
| void | setRelativePoseIntensityWrtDepth (const mrpt::poses::CPose3D &p) |
| Set the pose of the intensity camera wrt the depth camera. More... | |
| const mrpt::poses::CPose3D & | getRelativePoseIntensityWrtDepth () const |
| TDepth2RangeArray & | getRawDepth2RangeConversion () |
| Get a reference to the array that convert raw depth values (10 or 11 bit) into ranges in meters, so it can be read or replaced by the user. More... | |
| const TDepth2RangeArray & | getRawDepth2RangeConversion () const |
| void | enableGrabRGB (bool enable=true) |
| Enable/disable the grabbing of the RGB channel. More... | |
| bool | isGrabRGBEnabled () const |
| void | enableGrabDepth (bool enable=true) |
| Enable/disable the grabbing of the depth channel. More... | |
| bool | isGrabDepthEnabled () const |
| void | enableGrabAccelerometers (bool enable=true) |
| Enable/disable the grabbing of the inertial data. More... | |
| bool | isGrabAccelerometersEnabled () const |
| void | enableGrab3DPoints (bool enable=true) |
| Enable/disable the grabbing of the 3D point clouds. More... | |
| bool | isGrab3DPointsEnabled () const |
Static Public Member Functions | |
| static void | registerClass (const TSensorClassId *pNewClass) |
| Register a class into the internal list of "CGenericSensor" descendents. More... | |
| static CGenericSensor * | createSensor (const std::string &className) |
| Creates a sensor by a name of the class. More... | |
| static CGenericSensorPtr | createSensorPtr (const std::string &className) |
| Just like createSensor, but returning a smart pointer to the newly created sensor object. More... | |
Protected Member Functions | |
| virtual void | loadConfig_sensorSpecific (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| See the class documentation at the top for expected parameters. More... | |
| void | appendObservations (const std::vector< mrpt::utils::CSerializablePtr > &obj) |
| This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations. More... | |
| void | appendObservation (const mrpt::utils::CSerializablePtr &obj) |
| Like appendObservations() but for just one observation. More... | |
Protected Attributes | |
| mrpt::poses::CPose3D | m_sensorPoseOnRobot |
| bool | m_preview_window |
| Show preview window while grabbing. More... | |
| size_t | m_preview_window_decimation |
| If preview is enabled, only show 1 out of N images. More... | |
| size_t | m_preview_decim_counter_range |
| size_t | m_preview_decim_counter_rgb |
| mrpt::gui::CDisplayWindowPtr | m_win_range |
| mrpt::gui::CDisplayWindowPtr | m_win_int |
| mrpt::utils::TCamera | m_cameraParamsRGB |
| Params for the RGB camera. More... | |
| mrpt::utils::TCamera | m_cameraParamsDepth |
| Params for the Depth camera. More... | |
| mrpt::poses::CPose3D | m_relativePoseIntensityWRTDepth |
| See mrpt::obs::CObservation3DRangeScan for a diagram of this pose. More... | |
| int | m_initial_tilt_angle |
| Set Kinect tilt to an initial deegre (it should be take in account in the sensor pose by the user) More... | |
| double | m_maxRange |
| Sensor max range (meters) More... | |
| int | m_user_device_number |
| Number of device to open (0:first,...) More... | |
| bool | m_grab_image |
| bool | m_grab_depth |
| bool | m_grab_3D_points |
| bool | m_grab_IMU |
| Default: all true. More... | |
| TVideoChannel | m_video_channel |
| The video channel to open: RGB or IR. More... | |
| size_t | m_grab_decimation_counter |
| Used when "m_grab_decimation" is enabled. More... | |
| TSensorState | m_state |
| bool | m_verbose |
| std::string | m_path_for_external_images |
| The path where to save off-rawlog images: empty means save images embedded in the rawlog. More... | |
| std::string | m_external_images_format |
| The extension ("jpg","gif","png",...) that determines the format of images saved externally. More... | |
| unsigned int | m_external_images_jpeg_quality |
| For JPEG images, the quality (default=95%). More... | |
Common settings to any sensor, loaded in "loadConfig" | |
| double | m_process_rate |
| See CGenericSensor. More... | |
| size_t | m_max_queue_len |
| See CGenericSensor. More... | |
| size_t | m_grab_decimation |
| If set to N>=2, only 1 out of N observations will be saved to m_objList. More... | |
| std::string | m_sensorLabel |
| See CGenericSensor. More... | |
Private Types | |
| typedef std::map< std::string, const TSensorClassId * > | registered_sensor_classes_t |
| Used in registerClass. More... | |
Private Member Functions | |
| void | calculate_range2meters () |
| Compute m_range2meters at construction. More... | |
Static Private Member Functions | |
| static registered_sensor_classes_t & | get_registered_sensor_classes () |
| Access to singleton. More... | |
Private Attributes | |
| std::vector< uint8_t > | m_buf_depth |
| std::vector< uint8_t > | m_buf_rgb |
| Temporary buffers for image grabbing. More... | |
| TDepth2RangeArray | m_range2meters |
| The table raw depth -> range in meters. More... | |
| synch::CCriticalSection | m_csObjList |
| The critical section for m_objList. More... | |
| TListObservations | m_objList |
| The queue of objects to be returned by getObservations. More... | |
Member Typedef Documentation
◆ ConstPtr
|
inherited |
Definition at line 124 of file CGenericSensor.h.
◆ Ptr
|
inherited |
Definition at line 123 of file CGenericSensor.h.
◆ registered_sensor_classes_t
|
privateinherited |
Used in registerClass.
Definition at line 130 of file CGenericSensor.h.
◆ TDepth2RangeArray
| typedef float mrpt::hwdrivers::CKinect::TDepth2RangeArray[KINECT_RANGES_TABLE_LEN] |
◆ TListObservations
|
inherited |
Definition at line 89 of file CGenericSensor.h.
◆ TListObsPair
|
inherited |
Definition at line 90 of file CGenericSensor.h.
Member Enumeration Documentation
◆ TSensorState
|
inherited |
The current state of the sensor.
- See also
- CGenericSensor::getState
| Enumerator | |
|---|---|
| ssInitializing | |
| ssWorking | |
| ssError | |
Definition at line 95 of file CGenericSensor.h.
◆ TVideoChannel
RGB or IR video channel identifiers.
- See also
- setVideoChannel
| Enumerator | |
|---|---|
| VIDEO_CHANNEL_RGB | |
| VIDEO_CHANNEL_IR | |
Constructor & Destructor Documentation
◆ CKinect()
| CKinect::CKinect | ( | ) |
Default ctor.
Definition at line 81 of file CKinect.cpp.
References calculate_range2meters(), mrpt::utils::TCamera::cx(), mrpt::utils::TCamera::cy(), mrpt::utils::TCamera::dist, mrpt::utils::TCamera::fx(), mrpt::utils::TCamera::fy(), KINECT_RANGES_TABLE_LEN, m_cameraParamsDepth, m_cameraParamsRGB, m_maxRange, m_range2meters, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, mrpt::utils::TCamera::ncols, mrpt::utils::TCamera::nrows, and THROW_EXCEPTION.
◆ ~CKinect()
| CKinect::~CKinect | ( | ) |
Member Function Documentation
◆ appendObservation()
|
inlineprotectedinherited |
Like appendObservations() but for just one observation.
Definition at line 168 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CCANBusReader::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), and mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow().
◆ appendObservations()
|
protectedinherited |
This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations.
Passed objects must be created in dynamic memory and a smart pointer passed. Example of creation:
If several observations are passed at once in the vector, they'll be considered as a block regarding the grabbing decimation factor.
Definition at line 53 of file CGenericSensor.cpp.
References CLASS_ID, mrpt::hwdrivers::CGenericSensor::m_csObjList, mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_objList, and THROW_EXCEPTION.
Referenced by doProcess(), and mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess().
◆ calculate_range2meters()
|
private |
Compute m_range2meters at construction.
Definition at line 58 of file CKinect.cpp.
References KINECT_RANGES_TABLE_LEN.
Referenced by CKinect().
◆ close()
| void CKinect::close | ( | ) |
Close the Connection to the sensor (not need to call it manually unless desired for some reason, since it's called at destructor)
Definition at line 457 of file CKinect.cpp.
Referenced by open(), and ~CKinect().
◆ createSensor()
|
staticinherited |
Creates a sensor by a name of the class.
Typically the user may want to create a smart pointer around the returned pointer, whis is made with:
- Returns
- A pointer to a new class, or NULL if class name is unknown.
Definition at line 103 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
◆ createSensorPtr()
|
inlinestaticinherited |
Just like createSensor, but returning a smart pointer to the newly created sensor object.
Definition at line 201 of file CGenericSensor.h.
◆ disablePreviewRGB()
|
inline |
◆ doProcess()
|
virtual |
To be called at a high rate (>XX Hz), this method populates the internal buffer of received observations.
This method will be invoked at a minimum rate of "process_rate" (Hz)
This method is mainly intended for usage within rawlog-grabber or similar programs. For an alternative, see getNextObservation()
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
- See also
- getNextObservation
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 159 of file CKinect.cpp.
References mrpt::hwdrivers::CGenericSensor::appendObservations(), getNextObservation(), m_grab_3D_points, m_grab_depth, m_grab_image, m_grab_IMU, mrpt::hwdrivers::CGenericSensor::m_state, mrpt::hwdrivers::CGenericSensor::ssError, mrpt::hwdrivers::CGenericSensor::ssWorking, and THROW_EXCEPTION.
◆ enableGrab3DPoints()
|
inline |
◆ enableGrabAccelerometers()
|
inline |
◆ enableGrabDepth()
|
inline |
◆ enableGrabRGB()
|
inline |
◆ enablePreviewRGB()
|
inline |
◆ enableVerbose()
|
inlineinherited |
Enable or disable extra debug info dumped to std::cout during sensor operation.
Default: disabled unless the environment variable "MRPT_HWDRIVERS_VERBOSE" is set to "1" during object creation.
Definition at line 113 of file CGenericSensor.h.
◆ get_registered_sensor_classes()
|
staticprivateinherited |
Access to singleton.
Definition at line 111 of file CGenericSensor.cpp.
Referenced by mrpt::hwdrivers::CGenericSensor::createSensor(), and mrpt::hwdrivers::CGenericSensor::registerClass().
◆ getCameraParamsDepth()
|
inline |
◆ getCameraParamsIntensity()
|
inline |
◆ getColCount()
|
inline |
◆ getDeviceIndexToOpen()
|
inline |
◆ getExternalImageJPEGQuality()
|
inlineinherited |
Definition at line 255 of file CGenericSensor.h.
◆ getMaxRange()
|
inline |
◆ getNextObservation() [1/2]
| void CKinect::getNextObservation | ( | mrpt::obs::CObservation3DRangeScan & | _out_obs, |
| bool & | there_is_obs, | ||
| bool & | hardware_error | ||
| ) |
The main data retrieving function, to be called after calling loadConfig() and initialize().
- Parameters
-
out_obs The output retrieved observation (only if there_is_obs=true). there_is_obs If set to false, there was no new observation. hardware_error True on hardware/comms error.
- See also
- doProcess
Definition at line 514 of file CKinect.cpp.
References mrpt::obs::CObservation3DRangeScan::cameraParams, mrpt::obs::CObservation3DRangeScan::cameraParamsIntensity, mrpt::gui::CDisplayWindow::Create(), mrpt::obs::CObservation3DRangeScan::hasIntensityImage, mrpt::obs::CObservation3DRangeScan::hasRangeImage, mrpt::obs::CObservation3DRangeScan::intensityImage, m_cameraParamsDepth, m_cameraParamsRGB, m_grab_3D_points, m_grab_depth, m_grab_image, m_maxRange, m_preview_decim_counter_range, m_preview_decim_counter_rgb, m_preview_window, m_preview_window_decimation, m_relativePoseIntensityWRTDepth, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, m_sensorPoseOnRobot, m_win_int, m_win_range, mrpt::utils::TCamera::ncols, mrpt::system::now(), mrpt::utils::TCamera::nrows, mrpt::obs::CObservation3DRangeScan::project3DPointsFromDepthImage(), mrpt::obs::CObservation3DRangeScan::rangeImage, mrpt::obs::CObservation3DRangeScan::relativePoseIntensityWRTDepth, mrpt::system::secondsToTimestamp(), mrpt::obs::CObservation::sensorLabel, mrpt::obs::CObservation3DRangeScan::sensorPose, mrpt::obs::CObservation3DRangeScan::swap(), and mrpt::obs::CObservation::timestamp.
Referenced by doProcess(), and getNextObservation().
◆ getNextObservation() [2/2]
| void CKinect::getNextObservation | ( | mrpt::obs::CObservation3DRangeScan & | out_obs, |
| mrpt::obs::CObservationIMU & | out_obs_imu, | ||
| bool & | there_is_obs, | ||
| bool & | hardware_error | ||
| ) |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
- Note
- This method also grabs data from the accelerometers, returning them in out_obs_imu
Definition at line 643 of file CKinect.cpp.
References mrpt::obs::CObservationIMU::dataIsPresent, getNextObservation(), mrpt::obs::IMU_X_ACC, mrpt::obs::IMU_Y_ACC, mrpt::obs::IMU_Z_ACC, m_grab_IMU, mrpt::obs::CObservationIMU::rawMeasurements, mrpt::obs::CObservation::sensorLabel, mrpt::obs::CObservation3DRangeScan::sensorPose, mrpt::obs::CObservationIMU::sensorPose, and mrpt::obs::CObservation::timestamp.
◆ getObservations()
|
inherited |
Returns a list of enqueued objects, emptying it (thread-safe).
The objects must be freed by the invoker.
Definition at line 90 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::m_csObjList, and mrpt::hwdrivers::CGenericSensor::m_objList.
◆ getPreviewDecimation()
|
inline |
◆ getProcessRate()
|
inlineinherited |
Definition at line 105 of file CGenericSensor.h.
◆ getRawDepth2RangeConversion() [1/2]
|
inline |
Get a reference to the array that convert raw depth values (10 or 11 bit) into ranges in meters, so it can be read or replaced by the user.
If you replace it, remember to set the first and last entries (index 0 and KINECT_RANGES_TABLE_LEN-1) to zero, to indicate that those are invalid ranges.
◆ getRawDepth2RangeConversion() [2/2]
|
inline |
◆ getRelativePoseIntensityWrtDepth()
|
inline |
◆ getRowCount()
|
inline |
◆ GetRuntimeClass()
|
pure virtualinherited |
◆ getSensorLabel()
|
inlineinherited |
Definition at line 107 of file CGenericSensor.h.
◆ getState()
|
inlineinherited |
The current state of the sensor
Definition at line 103 of file CGenericSensor.h.
◆ getTiltAngleDegrees()
| double CKinect::getTiltAngleDegrees | ( | ) |
Definition at line 732 of file CKinect.cpp.
References ASSERTMSG_, and isOpen().
◆ getVideoChannel()
|
inline |
Return the current video channel (RGB or IR)
- See also
- setVideoChannel
◆ initialize()
Initializes the 3D camera - should be invoked after calling loadConfig() or setting the different parameters with the set*() methods.
This method can or cannot be implemented in the derived class, depending on the need for it.
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 151 of file CKinect.cpp.
References open().
◆ isGrab3DPointsEnabled()
|
inline |
◆ isGrabAccelerometersEnabled()
|
inline |
◆ isGrabDepthEnabled()
|
inline |
◆ isGrabRGBEnabled()
|
inline |
◆ isOpen()
| bool CKinect::isOpen | ( | ) | const |
Whether there is a working connection to the sensor.
Definition at line 247 of file CKinect.cpp.
Referenced by getTiltAngleDegrees(), open(), setTiltAngleDegrees(), and setVideoChannel().
◆ isPreviewRGBEnabled()
|
inline |
◆ isVerboseEnabled()
|
inlineinherited |
Definition at line 114 of file CGenericSensor.h.
◆ loadConfig()
|
inherited |
Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 131 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_max_queue_len, mrpt::hwdrivers::CGenericSensor::m_process_rate, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, MRPT_END, MRPT_START, mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
Referenced by mrpt::hwdrivers::prepareVideoSourceFromPanel(), and mrpt::hwdrivers::prepareVideoSourceFromUserSelection().
◆ loadConfig_sensorSpecific()
|
protectedvirtual |
See the class documentation at the top for expected parameters.
Loads specific configuration for the device from a given source of configuration parameters, for example, an ".ini" file, loading from the section "[iniSection]" (see utils::CConfigFileBase and derived classes)
- Exceptions
-
This method must throw an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 189 of file CKinect.cpp.
References DEG2RAD, mrpt::poses::CPose3D::fromString(), mrpt::utils::TStereoCamera::leftCamera, mrpt::utils::TStereoCamera::loadFromConfigFile(), m_cameraParamsDepth, m_cameraParamsRGB, m_grab_3D_points, m_grab_depth, m_grab_image, m_grab_IMU, m_initial_tilt_angle, m_preview_window, m_relativePoseIntensityWRTDepth, m_sensorPoseOnRobot, m_user_device_number, m_video_channel, mrpt::utils::CConfigFileBase::read_bool(), mrpt::utils::CConfigFileBase::read_enum(), mrpt::utils::CConfigFileBase::read_float(), mrpt::utils::CConfigFileBase::read_int(), mrpt::utils::CConfigFileBase::read_string(), mrpt::utils::TStereoCamera::rightCamera, mrpt::utils::TStereoCamera::rightCameraPose, mrpt::poses::CPose3D::setFromValues(), and twist().
◆ open()
| void CKinect::open | ( | ) |
Try to open the camera (set all the parameters before calling this) - users may also call initialize(), which in turn calls this method.
Raises an exception upon error.
- Exceptions
-
std::exception A textual description of the error.
Definition at line 373 of file CKinect.cpp.
References close(), isOpen(), m_buf_depth, m_buf_rgb, m_cameraParamsDepth, m_cameraParamsRGB, m_initial_tilt_angle, m_user_device_number, m_video_channel, mrpt::utils::TCamera::ncols, mrpt::utils::TCamera::nrows, setTiltAngleDegrees(), THROW_EXCEPTION, THROW_EXCEPTION_FMT, and VIDEO_CHANNEL_IR.
Referenced by initialize().
◆ registerClass()
|
staticinherited |
Register a class into the internal list of "CGenericSensor" descendents.
Used internally in the macros DEFINE_GENERIC_SENSOR, etc...
Can be used as "CGenericSensor::registerClass( SENSOR_CLASS_ID(CMySensor) );" if building custom sensors outside mrpt libraries in user code.
Definition at line 120 of file CGenericSensor.cpp.
References mrpt::hwdrivers::TSensorClassId::className, and mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR::CLASSINIT_GENERIC_SENSOR().
◆ setCameraParamsDepth()
|
inline |
◆ setCameraParamsIntensity()
|
inline |
◆ setDeviceIndexToOpen()
|
inline |
◆ setExternalImageFormat()
|
inlineinherited |
Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg".
Definition at line 247 of file CGenericSensor.h.
◆ setExternalImageJPEGQuality()
|
inlineinherited |
The quality of JPEG compression, when external images is enabled and the format is "jpg".
- See also
- setExternalImageFormat
Definition at line 252 of file CGenericSensor.h.
References quality.
◆ setPathForExternalImages()
|
virtual |
Set the path where to save off-rawlog image files (this class DOES take into account this path).
An empty string (the default value at construction) means to save images embedded in the rawlog, instead of on separate files.
- Exceptions
-
std::exception If the directory doesn't exists and cannot be created.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 704 of file CKinect.cpp.
References MRPT_UNUSED_PARAM.
◆ setPreviewDecimation()
|
inline |
◆ setRelativePoseIntensityWrtDepth()
|
inline |
Set the pose of the intensity camera wrt the depth camera.
- See also
- See mrpt::obs::CObservation3DRangeScan for a 3D diagram of this pose
◆ setSensorLabel()
|
inlineinherited |
Definition at line 108 of file CGenericSensor.h.
◆ setTiltAngleDegrees()
| void CKinect::setTiltAngleDegrees | ( | double | angle | ) |
Change tilt angle.
- Note
- Sensor must be open first.
Definition at line 720 of file CKinect.cpp.
References ASSERTMSG_, isOpen(), and MRPT_UNUSED_PARAM.
Referenced by open().
◆ setVideoChannel()
| void CKinect::setVideoChannel | ( | const TVideoChannel | vch | ) |
Changes the video channel to open (RGB or IR) - you can call this method before start grabbing or in the middle of streaming and the video source will change on the fly.
Default is RGB channel.
Definition at line 477 of file CKinect.cpp.
References isOpen(), m_video_channel, MRPT_UNUSED_PARAM, THROW_EXCEPTION, and VIDEO_CHANNEL_IR.
Member Data Documentation
◆ m_buf_depth
|
private |
◆ m_buf_rgb
|
private |
◆ m_cameraParamsDepth
|
protected |
Params for the Depth camera.
Definition at line 380 of file CKinect.h.
Referenced by CKinect(), getNextObservation(), loadConfig_sensorSpecific(), and open().
◆ m_cameraParamsRGB
|
protected |
Params for the RGB camera.
Definition at line 379 of file CKinect.h.
Referenced by CKinect(), getNextObservation(), loadConfig_sensorSpecific(), and open().
◆ m_csObjList
|
privateinherited |
The critical section for m_objList.
Definition at line 126 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::getObservations().
◆ m_external_images_format
|
protectedinherited |
The extension ("jpg","gif","png",...) that determines the format of images saved externally.
- See also
- setPathForExternalImages
Definition at line 152 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_external_images_jpeg_quality
|
protectedinherited |
For JPEG images, the quality (default=95%).
Definition at line 153 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_grab_3D_points
|
protected |
Definition at line 389 of file CKinect.h.
Referenced by doProcess(), getNextObservation(), and loadConfig_sensorSpecific().
◆ m_grab_decimation
|
protectedinherited |
If set to N>=2, only 1 out of N observations will be saved to m_objList.
Definition at line 139 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_decimation_counter
|
protectedinherited |
Used when "m_grab_decimation" is enabled.
Definition at line 144 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_depth
|
protected |
Definition at line 389 of file CKinect.h.
Referenced by doProcess(), getNextObservation(), and loadConfig_sensorSpecific().
◆ m_grab_image
|
protected |
Definition at line 389 of file CKinect.h.
Referenced by doProcess(), getNextObservation(), and loadConfig_sensorSpecific().
◆ m_grab_IMU
|
protected |
Default: all true.
Definition at line 389 of file CKinect.h.
Referenced by doProcess(), getNextObservation(), and loadConfig_sensorSpecific().
◆ m_initial_tilt_angle
|
protected |
Set Kinect tilt to an initial deegre (it should be take in account in the sensor pose by the user)
Definition at line 383 of file CKinect.h.
Referenced by loadConfig_sensorSpecific(), and open().
◆ m_max_queue_len
|
protectedinherited |
See CGenericSensor.
Definition at line 138 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_maxRange
|
protected |
Sensor max range (meters)
Definition at line 385 of file CKinect.h.
Referenced by CKinect(), and getNextObservation().
◆ m_objList
|
privateinherited |
The queue of objects to be returned by getObservations.
Definition at line 127 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), mrpt::hwdrivers::CGenericSensor::getObservations(), and mrpt::hwdrivers::CGenericSensor::~CGenericSensor().
◆ m_path_for_external_images
|
protectedinherited |
The path where to save off-rawlog images: empty means save images embedded in the rawlog.
Definition at line 151 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::setPathForExternalImages().
◆ m_preview_decim_counter_range
|
protected |
Definition at line 366 of file CKinect.h.
Referenced by getNextObservation().
◆ m_preview_decim_counter_rgb
|
protected |
Definition at line 366 of file CKinect.h.
Referenced by getNextObservation().
◆ m_preview_window
|
protected |
Show preview window while grabbing.
Definition at line 364 of file CKinect.h.
Referenced by getNextObservation(), and loadConfig_sensorSpecific().
◆ m_preview_window_decimation
|
protected |
If preview is enabled, only show 1 out of N images.
Definition at line 365 of file CKinect.h.
Referenced by getNextObservation().
◆ m_process_rate
|
protectedinherited |
See CGenericSensor.
Definition at line 137 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_range2meters
|
private |
◆ m_relativePoseIntensityWRTDepth
|
protected |
See mrpt::obs::CObservation3DRangeScan for a diagram of this pose.
Definition at line 381 of file CKinect.h.
Referenced by getNextObservation(), and loadConfig_sensorSpecific().
◆ m_sensorLabel
|
protectedinherited |
See CGenericSensor.
Definition at line 140 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CCANBusReader::CCANBusReader(), mrpt::hwdrivers::CGPSInterface::CGPSInterface(), mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::CHokuyoURG::CHokuyoURG(), mrpt::hwdrivers::CIMUIntersense::CIMUIntersense(), mrpt::hwdrivers::CIMUXSens::CIMUXSens(), mrpt::hwdrivers::CIMUXSens_MT4::CIMUXSens_MT4(), CKinect(), mrpt::hwdrivers::CNationalInstrumentsDAQ::CNationalInstrumentsDAQ(), mrpt::hwdrivers::CRoboPeakLidar::CRoboPeakLidar(), mrpt::hwdrivers::CSickLaserSerial::CSickLaserSerial(), mrpt::hwdrivers::CSickLaserUSB::CSickLaserUSB(), mrpt::hwdrivers::CSkeletonTracker::CSkeletonTracker(), mrpt::hwdrivers::CSwissRanger3DCamera::CSwissRanger3DCamera(), mrpt::hwdrivers::CVelodyneScanner::CVelodyneScanner(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreview(), and mrpt::hwdrivers::CSkeletonTracker::processPreviewNone().
◆ m_sensorPoseOnRobot
|
protected |
Definition at line 362 of file CKinect.h.
Referenced by getNextObservation(), and loadConfig_sensorSpecific().
◆ m_state
|
protectedinherited |
Definition at line 146 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), mrpt::hwdrivers::CIMUIntersense::initialize(), mrpt::hwdrivers::CIMUXSens::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CSkeletonTracker::initialize(), mrpt::hwdrivers::CVelodyneScanner::initialize(), mrpt::hwdrivers::CNationalInstrumentsDAQ::readFromDAQ(), and mrpt::hwdrivers::CIMUXSens::searchPortAndConnect().
◆ m_user_device_number
|
protected |
Number of device to open (0:first,...)
Definition at line 387 of file CKinect.h.
Referenced by loadConfig_sensorSpecific(), and open().
◆ m_verbose
|
protectedinherited |
Definition at line 147 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::CGenericSensor(), mrpt::hwdrivers::CRoboPeakLidar::checkCOMMs(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CNTRIPEmitter::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CHokuyoURG::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CVelodyneScanner::internal_read_PCAP_packet(), mrpt::hwdrivers::CGPSInterface::JAVAD_sendMessage(), mrpt::hwdrivers::CGPSInterface::legacy_topcon_setup_commands(), mrpt::hwdrivers::CGPSInterface::OnConnectionEstablished(), mrpt::hwdrivers::CGPSInterface::OnConnectionShutdown(), mrpt::hwdrivers::CNationalInstrumentsDAQ::stop(), and mrpt::hwdrivers::CGPSInterface::tryToOpenTheCOM().
◆ m_video_channel
|
protected |
The video channel to open: RGB or IR.
Definition at line 391 of file CKinect.h.
Referenced by loadConfig_sensorSpecific(), open(), and setVideoChannel().
◆ m_win_int
|
protected |
Definition at line 367 of file CKinect.h.
Referenced by getNextObservation().
◆ m_win_range
|
protected |
Definition at line 367 of file CKinect.h.
Referenced by getNextObservation().