Detailed Description
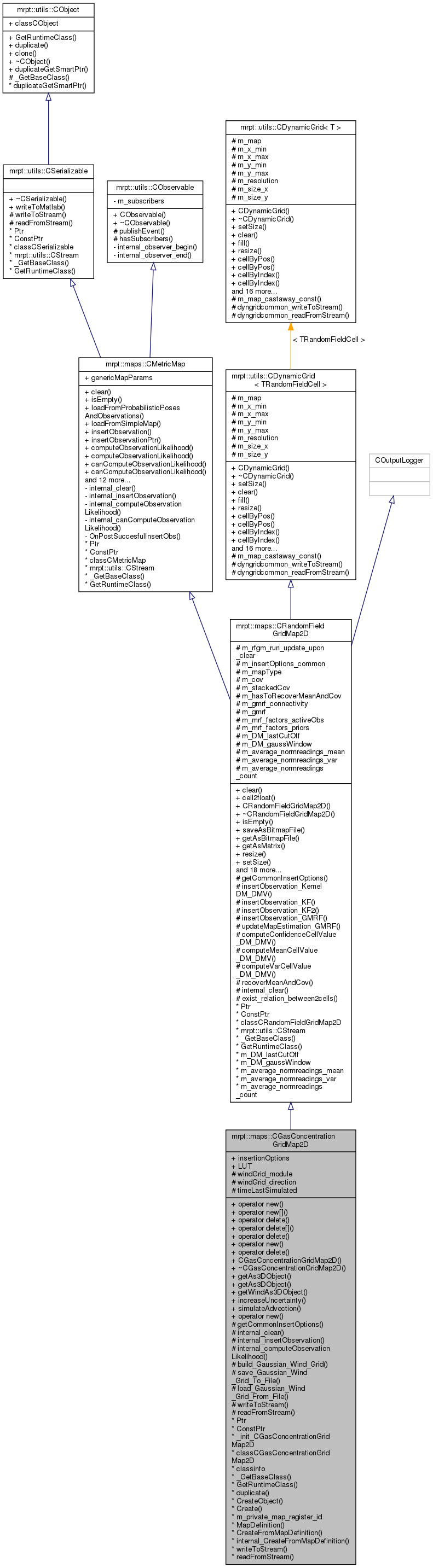
CGasConcentrationGridMap2D represents a PDF of gas concentrations over a 2D area.
There are a number of methods available to build the gas grid-map, depending on the value of "TMapRepresentation maptype" passed in the constructor (see base class mrpt::maps::CRandomFieldGridMap2D).
Update the map with insertIndividualReading() or insertObservation()
- See also
- mrpt::maps::CRandomFieldGridMap2D, mrpt::maps::CMetricMap, mrpt::utils::CDynamicGrid, The application icp-slam, mrpt::maps::CMultiMetricMap
Definition at line 34 of file maps/CGasConcentrationGridMap2D.h.
#include <mrpt/maps/CGasConcentrationGridMap2D.h>
Classes | |
| struct | TGaussianCell |
| struct | TGaussianWindTable |
| struct | TInsertionOptions |
| Parameters related with inserting observations into the map: More... | |
| struct | TMapDefinition |
| struct | TMapDefinitionBase |
Public Types | |
| enum | TMapRepresentation { mrKernelDM = 0 , mrAchim = 0 , mrKalmanFilter , mrKalmanApproximate , mrKernelDMV , mrGMRF_SD } |
| The type of map representation to be used, see CRandomFieldGridMap2D for a discussion. More... | |
| enum | TGridInterpolationMethod { gimNearest = 0 , gimBilinear } |
| typedef std::shared_ptr< ConnectivityDescriptor > | ConnectivityDescriptorPtr |
Public Member Functions | |
| void * | operator new (size_t size) |
| void * | operator new[] (size_t size) |
| void | operator delete (void *ptr) throw () |
| void | operator delete[] (void *ptr) throw () |
| void | operator delete (void *memory, void *ptr) throw () |
| void * | operator new (size_t size, const std::nothrow_t &) throw () |
| void | operator delete (void *ptr, const std::nothrow_t &) throw () |
| CGasConcentrationGridMap2D (TMapRepresentation mapType=mrAchim, float x_min=-2, float x_max=2, float y_min=-2, float y_max=2, float resolution=0.1) | |
| Constructor. More... | |
| virtual | ~CGasConcentrationGridMap2D () |
| Destructor. More... | |
| virtual void | getAs3DObject (mrpt::opengl::CSetOfObjectsPtr &outObj) const MRPT_OVERRIDE |
| Returns a 3D object representing the map. More... | |
| virtual void | getAs3DObject (mrpt::opengl::CSetOfObjectsPtr &meanObj, mrpt::opengl::CSetOfObjectsPtr &varObj) const MRPT_OVERRIDE |
| Returns two 3D objects representing the mean and variance maps. More... | |
| void | getWindAs3DObject (mrpt::opengl::CSetOfObjectsPtr &windObj) const |
| Returns the 3D object representing the wind grid information. More... | |
| virtual void | increaseUncertainty (const double STD_increase_value) |
| Increase the kf_std of all cells from the m_map This mehod is usually called by the main_map to simulate loss of confidence in measurements when time passes. More... | |
| bool | simulateAdvection (const double &STD_increase_value) |
| Implements the transition model of the gasConcentration map using the information of the wind maps More... | |
| void | clear () |
| Calls the base CMetricMap::clear Declared here to avoid ambiguity between the two clear() in both base classes. More... | |
| float | cell2float (const TRandomFieldCell &c) const MRPT_OVERRIDE |
| virtual float | cell2float (const TRandomFieldCell &c) const |
| The user must implement this in order to provide "saveToTextFile" a way to convert each cell into a numeric value. More... | |
| virtual bool | isEmpty () const MRPT_OVERRIDE |
| Returns true if the map is empty/no observation has been inserted (in this class it always return false, unless redefined otherwise in base classes) More... | |
| virtual void | saveAsBitmapFile (const std::string &filName) const |
| Save the current map as a graphical file (BMP,PNG,...). More... | |
| virtual void | getAsBitmapFile (mrpt::utils::CImage &out_img) const |
| Returns an image just as described in saveAsBitmapFile. More... | |
| virtual void | getAsMatrix (mrpt::math::CMatrixDouble &out_mat) const |
| Like saveAsBitmapFile(), but returns the data in matrix form (first row in the matrix is the upper (y_max) part of the map) More... | |
| void | getAsMatrix (MAT &m) const |
| Get the entire grid as a matrix. More... | |
| virtual void | resize (double new_x_min, double new_x_max, double new_y_min, double new_y_max, const TRandomFieldCell &defaultValueNewCells, double additionalMarginMeters=1.0f) MRPT_OVERRIDE |
| Changes the size of the grid, maintaining previous contents. More... | |
| virtual void | resize (double new_x_min, double new_x_max, double new_y_min, double new_y_max, const TRandomFieldCell &defaultValueNewCells, double additionalMarginMeters=2.0) |
| Changes the size of the grid, maintaining previous contents. More... | |
| virtual void | setSize (const double x_min, const double x_max, const double y_min, const double y_max, const double resolution, const TRandomFieldCell *fill_value=NULL) |
| Changes the size of the grid, erasing previous contents. More... | |
| void | setSize (const double x_min, const double x_max, const double y_min, const double y_max, const double resolution, const TRandomFieldCell *fill_value=NULL) |
| Changes the size of the grid, ERASING all previous contents. More... | |
| void | setCellsConnectivity (const ConnectivityDescriptorPtr &new_connectivity_descriptor) |
| Sets a custom object to define the connectivity between cells. More... | |
| float | compute3DMatchingRatio (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, const TMatchingRatioParams ¶ms) const MRPT_OVERRIDE |
| See docs in base class: in this class this always returns 0. More... | |
| virtual void | saveMetricMapRepresentationToFile (const std::string &filNamePrefix) const MRPT_OVERRIDE |
| The implementation in this class just calls all the corresponding method of the contained metric maps. More... | |
| virtual void | saveAsMatlab3DGraph (const std::string &filName) const |
| Save a matlab ".m" file which represents as 3D surfaces the mean and a given confidence level for the concentration of each cell. More... | |
| void | getAsMatlab3DGraphScript (std::string &out_script) const |
| Return a large text block with a MATLAB script to plot the contents of this map. More... | |
| TMapRepresentation | getMapType () |
| Return the type of the random-field grid map, according to parameters passed on construction. More... | |
| void | insertIndividualReading (const double sensorReading, const mrpt::math::TPoint2D &point, const bool update_map=true, const bool time_invariant=true, const double reading_stddev=.0) |
| Direct update of the map with a reading in a given position of the map, using the appropriate method according to mapType passed in the constructor. More... | |
| virtual void | predictMeasurement (const double x, const double y, double &out_predict_response, double &out_predict_response_variance, bool do_sensor_normalization, const TGridInterpolationMethod interp_method=gimNearest) |
| Returns the prediction of the measurement at some (x,y) coordinates, and its certainty (in the form of the expected variance). More... | |
| void | getMeanAndCov (mrpt::math::CVectorDouble &out_means, mrpt::math::CMatrixDouble &out_cov) const |
| Return the mean and covariance vector of the full Kalman filter estimate (works for all KF-based methods). More... | |
| void | getMeanAndSTD (mrpt::math::CVectorDouble &out_means, mrpt::math::CVectorDouble &out_STD) const |
| Return the mean and STD vectors of the full Kalman filter estimate (works for all KF-based methods). More... | |
| void | setMeanAndSTD (mrpt::math::CVectorDouble &out_means, mrpt::math::CVectorDouble &out_STD) |
| Load the mean and STD vectors of the full Kalman filter estimate (works for all KF-based methods). More... | |
| void | updateMapEstimation () |
| Run the method-specific procedure required to ensure that the mean & variances are up-to-date with all inserted observations. More... | |
| void | enableVerbose (bool enable_verbose) |
| bool | isEnabledVerbose () const |
| void | enableProfiler (bool enable=true) |
| bool | isProfilerEnabled () const |
| void | loadFromProbabilisticPosesAndObservations (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| void | loadFromSimpleMap (const mrpt::maps::CSimpleMap &Map) |
| Load the map contents from a CSimpleMap object, erasing all previous content of the map. More... | |
| bool | insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| Insert the observation information into this map. More... | |
| bool | insertObservationPtr (const mrpt::obs::CObservationPtr &obs, const mrpt::poses::CPose3D *robotPose=NULL) |
| A wrapper for smart pointers, just calls the non-smart pointer version. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) |
| Computes the log-likelihood of a given observation given an arbitrary robot 3D pose. More... | |
| double | computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose2D &takenFrom) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| virtual bool | canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| bool | canComputeObservationLikelihood (const mrpt::obs::CObservationPtr &obs) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| double | computeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf, const mrpt::poses::CPose2D &takenFrom) |
| Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame. More... | |
| bool | canComputeObservationsLikelihood (const mrpt::obs::CSensoryFrame &sf) const |
| Returns true if this map is able to compute a sensible likelihood function for this observation (i.e. More... | |
| virtual void | determineMatching2D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose2D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const |
| Computes the matching between this and another 2D point map, which includes finding: More... | |
| virtual void | determineMatching3D (const mrpt::maps::CMetricMap *otherMap, const mrpt::poses::CPose3D &otherMapPose, mrpt::utils::TMatchingPairList &correspondences, const TMatchingParams ¶ms, TMatchingExtraResults &extraResults) const |
| Computes the matchings between this and another 3D points map - method used in 3D-ICP. More... | |
| virtual void | auxParticleFilterCleanUp () |
| This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation". More... | |
| virtual float | squareDistanceToClosestCorrespondence (float x0, float y0) const |
| Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map. More... | |
| virtual const mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () const |
| If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it. More... | |
| virtual mrpt::maps::CSimplePointsMap * | getAsSimplePointsMap () |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
| void | fill (const TRandomFieldCell &value) |
| Fills all the cells with the same value. More... | |
| TRandomFieldCell * | cellByPos (double x, double y) |
| Returns a pointer to the contents of a cell given by its coordinates, or NULL if it is out of the map extensions. More... | |
| const TRandomFieldCell * | cellByPos (double x, double y) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| TRandomFieldCell * | cellByIndex (unsigned int cx, unsigned int cy) |
| Returns a pointer to the contents of a cell given by its cell indexes, or NULL if it is out of the map extensions. More... | |
| const TRandomFieldCell * | cellByIndex (unsigned int cx, unsigned int cy) const |
| Returns a pointer to the contents of a cell given by its cell indexes, or NULL if it is out of the map extensions. More... | |
| size_t | getSizeX () const |
| Returns the horizontal size of grid map in cells count. More... | |
| size_t | getSizeY () const |
| Returns the vertical size of grid map in cells count. More... | |
| double | getXMin () const |
| Returns the "x" coordinate of left side of grid map. More... | |
| double | getXMax () const |
| Returns the "x" coordinate of right side of grid map. More... | |
| double | getYMin () const |
| Returns the "y" coordinate of top side of grid map. More... | |
| double | getYMax () const |
| Returns the "y" coordinate of bottom side of grid map. More... | |
| double | getResolution () const |
| Returns the resolution of the grid map. More... | |
| int | x2idx (double x) const |
| Transform a coordinate values into cell indexes. More... | |
| int | y2idx (double y) const |
| int | xy2idx (double x, double y) const |
| void | idx2cxcy (const int &idx, int &cx, int &cy) const |
| Transform a global (linear) cell index value into its corresponding (x,y) cell indexes. More... | |
| double | idx2x (int cx) const |
| Transform a cell index into a coordinate value of the cell central point. More... | |
| double | idx2y (int cy) const |
| bool | saveToTextFile (const std::string &fileName) const |
| Saves a float representation of the grid (via "cell2float()") to a text file. More... | |
RTTI classes and functions | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Public Attributes | |
| mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions | insertionOptions |
| struct MAPS_IMPEXP mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable | LUT |
| TMapGenericParams | genericMapParams |
| Common params to all maps. More... | |
Static Public Attributes | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCRandomFieldGridMap2D |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCMetricMap |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
| virtual CRandomFieldGridMap2D::TInsertionOptionsCommon * | getCommonInsertOptions () MRPT_OVERRIDE |
| Get the part of the options common to all CRandomFieldGridMap2D classes. More... | |
| void | internal_clear () MRPT_OVERRIDE |
| Erase all the contents of the map. More... | |
| bool | internal_insertObservation (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D *robotPose=NULL) MRPT_OVERRIDE |
| Internal method called by insertObservation() More... | |
| double | internal_computeObservationLikelihood (const mrpt::obs::CObservation *obs, const mrpt::poses::CPose3D &takenFrom) MRPT_OVERRIDE |
| Internal method called by computeObservationLikelihood() More... | |
| bool | build_Gaussian_Wind_Grid () |
| Builds a LookUp table with the values of the Gaussian Weights result of the wind advection for a specific std_windNoise_phi value. More... | |
| bool | save_Gaussian_Wind_Grid_To_File () |
| bool | load_Gaussian_Wind_Grid_From_File () |
| void | insertObservation_KernelDM_DMV (double normReading, const mrpt::math::TPoint2D &point, bool is_DMV) |
| The implementation of "insertObservation" for Achim Lilienthal's map models DM & DM+V. More... | |
| void | insertObservation_KF (double normReading, const mrpt::math::TPoint2D &point) |
| The implementation of "insertObservation" for the (whole) Kalman Filter map model. More... | |
| void | insertObservation_KF2 (double normReading, const mrpt::math::TPoint2D &point) |
| The implementation of "insertObservation" for the Efficient Kalman Filter map model. More... | |
| void | insertObservation_GMRF (double normReading, const mrpt::math::TPoint2D &point, const bool update_map, const bool time_invariant, const double reading_information) |
| The implementation of "insertObservation" for the Gaussian Markov Random Field map model. More... | |
| void | updateMapEstimation_GMRF () |
| solves the minimum quadratic system to determine the new concentration of each cell More... | |
| double | computeConfidenceCellValue_DM_DMV (const TRandomFieldCell *cell) const |
| Computes the confidence of the cell concentration (alpha) More... | |
| double | computeMeanCellValue_DM_DMV (const TRandomFieldCell *cell) const |
| Computes the average cell concentration, or the overall average value if it has never been observed More... | |
| double | computeVarCellValue_DM_DMV (const TRandomFieldCell *cell) const |
| Computes the estimated variance of the cell concentration, or the overall average variance if it has never been observed More... | |
| void | recoverMeanAndCov () const |
| In the KF2 implementation, takes the auxiliary matrices and from them update the cells' mean and std values. More... | |
| bool | exist_relation_between2cells (const mrpt::maps::COccupancyGridMap2D *m_Ocgridmap, size_t cxo_min, size_t cxo_max, size_t cyo_min, size_t cyo_max, const size_t seed_cxo, const size_t seed_cyo, const size_t objective_cxo, const size_t objective_cyo) |
| Check if two cells of the gridmap (m_map) are connected, based on the provided occupancy gridmap. More... | |
| void | publishEvent (const mrptEvent &e) const |
| Called when you want this object to emit an event to all the observers currently subscribed to this object. More... | |
| bool | hasSubscribers () const |
| Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read. More... | |
| std::vector< TRandomFieldCell > & | m_map_castaway_const () const |
| Used only from logically const method that really need to modify the object. More... | |
| void | dyngridcommon_writeToStream (mrpt::utils::CStream &out) const |
| void | dyngridcommon_readFromStream (mrpt::utils::CStream &in, bool cast_from_float=false) |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Protected Attributes | |
| mrpt::utils::CDynamicGrid< double > | windGrid_module |
| Gridmaps of the wind Direction/Module. More... | |
| mrpt::utils::CDynamicGrid< double > | windGrid_direction |
| mrpt::system::TTimeStamp | timeLastSimulated |
| The timestamp of the last time the advection simulation was executed. More... | |
| bool | m_rfgm_run_update_upon_clear |
| TInsertionOptionsCommon * | m_insertOptions_common |
| Common options to all random-field grid maps: pointer that is set to the derived-class instance of "insertOptions" upon construction of this class. More... | |
| TMapRepresentation | m_mapType |
| The map representation type of this map, as passed in the constructor. More... | |
| mrpt::math::CMatrixD | m_cov |
| The whole covariance matrix, used for the Kalman Filter map representation. More... | |
| mrpt::math::CMatrixD | m_stackedCov |
| The compressed band diagonal matrix for the KF2 implementation. More... | |
| bool | m_hasToRecoverMeanAndCov |
| Only for the KF2 implementation. More... | |
| ConnectivityDescriptorPtr | m_gmrf_connectivity |
| Empty: default. More... | |
| mrpt::graphs::ScalarFactorGraph | m_gmrf |
| std::vector< std::list< TObservationGMRF > > | m_mrf_factors_activeObs |
| Vector with the active observations and their respective Information. More... | |
| std::deque< TPriorFactorGMRF > | m_mrf_factors_priors |
| Vector with the precomputed priors for each GMRF model. More... | |
| std::vector< TRandomFieldCell > | m_map |
| The cells. More... | |
| double | m_x_min |
| double | m_x_max |
| double | m_y_min |
| double | m_y_max |
| double | m_resolution |
| size_t | m_size_x |
| size_t | m_size_y |
Auxiliary vars for DM & DM+V methods | |
| float | m_DM_lastCutOff |
| std::vector< float > | m_DM_gaussWindow |
| double | m_average_normreadings_mean |
| double | m_average_normreadings_var |
| size_t | m_average_normreadings_count |
Private Types | |
| typedef utils::CDynamicGrid< TRandomFieldCell > | BASE |
Private Member Functions | |
| virtual bool | internal_canComputeObservationLikelihood (const mrpt::obs::CObservation *obs) const |
| Internal method called by canComputeObservationLikelihood() More... | |
| virtual void | OnPostSuccesfulInsertObs (const mrpt::obs::CObservation *) |
| Hook for each time a "internal_insertObservation" returns "true" This is called automatically from insertObservation() when internal_insertObservation returns true. More... | |
| void | internal_observer_begin (CObserver *) |
| void | internal_observer_end (CObserver *) |
Private Attributes | |
| std::set< CObserver * > | m_subscribers |
RTTI stuff <br> | |
| typedef CGasConcentrationGridMap2DPtr | Ptr |
| typedef CGasConcentrationGridMap2DPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_CGasConcentrationGridMap2D |
| static mrpt::utils::TRuntimeClassId | classCGasConcentrationGridMap2D |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static CGasConcentrationGridMap2DPtr | Create () |
Map Definition Interface stuff (see mrpt::maps::TMetricMapInitializer) @{ | |
| static const size_t | m_private_map_register_id = mrpt::maps::internal::TMetricMapTypesRegistry::Instance().doRegister( "CGasConcentrationGridMap2D,gasGrid" ,& mrpt::maps::CGasConcentrationGridMap2D ::MapDefinition,& mrpt::maps::CGasConcentrationGridMap2D ::internal_CreateFromMapDefinition) |
| ID used to initialize class registration (just ignore it) More... | |
| static mrpt::maps::TMetricMapInitializer * | MapDefinition () |
| Returns default map definition initializer. More... | |
| static CGasConcentrationGridMap2D * | CreateFromMapDefinition (const mrpt::maps::TMetricMapInitializer &def) |
| Constructor from a map definition structure: initializes the map and its parameters accordingly. More... | |
| static mrpt::maps::CMetricMap * | internal_CreateFromMapDefinition (const mrpt::maps::TMetricMapInitializer &def) |
Member Typedef Documentation
◆ BASE
|
privateinherited |
Definition at line 119 of file maps/CRandomFieldGridMap2D.h.
◆ ConnectivityDescriptorPtr
|
inherited |
Definition at line 258 of file maps/CRandomFieldGridMap2D.h.
◆ ConstPtr
| typedef CGasConcentrationGridMap2DPtr mrpt::maps::CGasConcentrationGridMap2D::ConstPtr |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ Ptr
| typedef CGasConcentrationGridMap2DPtr mrpt::maps::CGasConcentrationGridMap2D::Ptr |
A typedef for the associated smart pointer
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
Member Enumeration Documentation
◆ TGridInterpolationMethod
|
inherited |
| Enumerator | |
|---|---|
| gimNearest | |
| gimBilinear | |
Definition at line 299 of file maps/CRandomFieldGridMap2D.h.
◆ TMapRepresentation
|
inherited |
The type of map representation to be used, see CRandomFieldGridMap2D for a discussion.
| Enumerator | |
|---|---|
| mrKernelDM | Gaussian kernel-based estimator (see discussion in mrpt::maps::CRandomFieldGridMap2D) |
| mrAchim | Another alias for "mrKernelDM", for backwards compatibility (see discussion in mrpt::maps::CRandomFieldGridMap2D) |
| mrKalmanFilter | "Brute-force" Kalman filter (see discussion in mrpt::maps::CRandomFieldGridMap2D) |
| mrKalmanApproximate | (see discussion in mrpt::maps::CRandomFieldGridMap2D) |
| mrKernelDMV | Double mean + variance Gaussian kernel-based estimator (see discussion in mrpt::maps::CRandomFieldGridMap2D) |
| mrGMRF_SD | Gaussian Markov Random Field, squared differences prior weights between 4 neighboring cells (see discussion in mrpt::maps::CRandomFieldGridMap2D) |
Definition at line 138 of file maps/CRandomFieldGridMap2D.h.
Constructor & Destructor Documentation
◆ CGasConcentrationGridMap2D()
| CGasConcentrationGridMap2D::CGasConcentrationGridMap2D | ( | TMapRepresentation | mapType = mrAchim, |
| float | x_min = -2, |
||
| float | x_max = 2, |
||
| float | y_min = -2, |
||
| float | y_max = 2, |
||
| float | resolution = 0.1 |
||
| ) |
Constructor.
Definition at line 91 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::CMetricMap::clear(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_lambdaObsLoss, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_min, insertionOptions, mrpt::system::now(), mrpt::utils::CDynamicGrid< T >::setSize(), timeLastSimulated, windGrid_direction, and windGrid_module.
◆ ~CGasConcentrationGridMap2D()
|
virtual |
Destructor.
Definition at line 118 of file CGasConcentrationGridMap2D.cpp.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ auxParticleFilterCleanUp()
|
inlinevirtualinherited |
This method is called at the end of each "prediction-update-map insertion" cycle within "mrpt::slam::CMetricMapBuilderRBPF::processActionObservation".
This method should normally do nothing, but in some cases can be used to free auxiliary cached variables.
Reimplemented in mrpt::maps::CLandmarksMap, and mrpt::maps::CMultiMetricMap.
Definition at line 232 of file maps/CMetricMap.h.
◆ build_Gaussian_Wind_Grid()
|
protected |
Builds a LookUp table with the values of the Gaussian Weights result of the wind advection for a specific std_windNoise_phi value.
Builds a LookUp table with the values of the Gaussian Weights result of the wind advection for a specific condition.
The LUT contains the values of the Gaussian Weigths and the references to the cell indexes to be applied.
Since the LUT is independent of the wind direction and angle, it generates the Gaussian Weights for different configurations
of wind angle and module values.
To increase precission, each cell of the grid is sub-divided in subcells of smaller size.
cell_i --> Cell origin (We consider our reference system in the bottom left corner of cell_i ).
Is the cell that contains the gas measurement which will be propagated by the wind.
The wind propagates in the shape of a 2D Gaussian with center in the target cell (cell_j)
cell_j --> Target cell. Is the cell where falls the center of the Gaussian that models the propagation of the gas comming from cell_i.
Definition at line 823 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::advectionFreq, mrpt::maps::CGasConcentrationGridMap2D::TGaussianCell::cx, mrpt::maps::CGasConcentrationGridMap2D::TGaussianCell::cy, mrpt::system::os::fclose(), mrpt::system::fileExists(), mrpt::system::os::fopen(), mrpt::format(), mrpt::system::os::fprintf(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getResolution(), insertionOptions, load_Gaussian_Wind_Grid_From_File(), LUT, LUT_TABLE, M_PI, M_PIf, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::max_r, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::resolution, mrpt::utils::round(), save_Gaussian_Wind_Grid_To_File(), mrpt::math::square(), mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::std_phi, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::std_r, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::std_windNoise_mod, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::std_windNoise_phi, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::table, and mrpt::maps::CGasConcentrationGridMap2D::TGaussianCell::value.
Referenced by internal_clear().
◆ canComputeObservationLikelihood() [1/2]
|
virtualinherited |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
obs The observation.
- See also
- computeObservationLikelihood, genericMapParams.enableObservationLikelihood
Definition at line 189 of file CMetricMap.cpp.
◆ canComputeObservationLikelihood() [2/2]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
◆ canComputeObservationsLikelihood()
|
inherited |
Returns true if this map is able to compute a sensible likelihood function for this observation (i.e.
an occupancy grid map cannot with an image). See: Maps and observations compatibility matrix
- Parameters
-
sf The observations.
- See also
- canComputeObservationLikelihood
Definition at line 94 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
◆ cell2float() [1/2]
|
inlinevirtualinherited |
The user must implement this in order to provide "saveToTextFile" a way to convert each cell into a numeric value.
Definition at line 274 of file CDynamicGrid.h.
◆ cell2float() [2/2]
|
inlineinherited |
Definition at line 131 of file maps/CRandomFieldGridMap2D.h.
◆ cellByIndex() [1/2]
|
inlineinherited |
Returns a pointer to the contents of a cell given by its cell indexes, or NULL if it is out of the map extensions.
Definition at line 203 of file CDynamicGrid.h.
◆ cellByIndex() [2/2]
|
inlineinherited |
Returns a pointer to the contents of a cell given by its cell indexes, or NULL if it is out of the map extensions.
Definition at line 212 of file CDynamicGrid.h.
◆ cellByPos() [1/2]
|
inlineinherited |
Returns a pointer to the contents of a cell given by its coordinates, or NULL if it is out of the map extensions.
Definition at line 183 of file CDynamicGrid.h.
◆ cellByPos() [2/2]
|
inlineinherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 192 of file CDynamicGrid.h.
◆ clear()
|
inlineinherited |
Calls the base CMetricMap::clear Declared here to avoid ambiguity between the two clear() in both base classes.
Definition at line 128 of file maps/CRandomFieldGridMap2D.h.
References mrpt::maps::CMetricMap::clear().
◆ clone()
|
inlineinherited |
◆ compute3DMatchingRatio()
|
virtualinherited |
See docs in base class: in this class this always returns 0.
Reimplemented from mrpt::maps::CMetricMap.
Definition at line 2316 of file CRandomFieldGridMap2D.cpp.
References MRPT_UNUSED_PARAM.
◆ computeConfidenceCellValue_DM_DMV()
|
protectedinherited |
Computes the confidence of the cell concentration (alpha)
Definition at line 1644 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::TRandomFieldCell::dm_mean_w, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::dm_sigma_omega, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, and mrpt::math::square().
Referenced by mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile().
◆ computeMeanCellValue_DM_DMV()
|
protectedinherited |
Computes the average cell concentration, or the overall average value if it has never been observed
Definition at line 1653 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::TRandomFieldCell::dm_mean, mrpt::maps::TRandomFieldCell::dm_mean_w, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::dm_sigma_omega, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_mean, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, and mrpt::math::square().
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), and mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile().
◆ computeObservationLikelihood() [1/2]
|
inherited |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 86 of file CMetricMap.cpp.
◆ computeObservationLikelihood() [2/2]
|
inherited |
Computes the log-likelihood of a given observation given an arbitrary robot 3D pose.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. obs The observation.
- Returns
- This method returns a log-likelihood.
Definition at line 196 of file CMetricMap.cpp.
Referenced by mrpt::slam::CMonteCarloLocalization2D::PF_SLAM_computeObservationLikelihoodForParticle(), mrpt::slam::CMonteCarloLocalization3D::PF_SLAM_computeObservationLikelihoodForParticle(), and mrpt::maps::CMultiMetricMapPDF::PF_SLAM_computeObservationLikelihoodForParticle().
◆ computeObservationsLikelihood()
|
inherited |
Returns the sum of the log-likelihoods of each individual observation within a mrpt::obs::CSensoryFrame.
See: Maps and observations compatibility matrix
- Parameters
-
takenFrom The robot's pose the observation is supposed to be taken from. sf The set of observations in a CSensoryFrame.
- Returns
- This method returns a log-likelihood.
- See also
- canComputeObservationsLikelihood
Definition at line 75 of file CMetricMap.cpp.
References mrpt::obs::CSensoryFrame::begin(), and mrpt::obs::CSensoryFrame::end().
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::auxiliarComputeObservationLikelihood().
◆ computeVarCellValue_DM_DMV()
|
protectedinherited |
Computes the estimated variance of the cell concentration, or the overall average variance if it has never been observed
Definition at line 1664 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::TRandomFieldCell::dm_mean_w, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::dm_sigma_omega, mrpt::maps::TRandomFieldCell::dmv_var_mean, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_var, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, and mrpt::math::square().
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), and mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile().
◆ Create()
|
static |
◆ CreateFromMapDefinition()
|
static |
Constructor from a map definition structure: initializes the map and its parameters accordingly.
Definition at line 36 of file CGasConcentrationGridMap2D.cpp.
◆ CreateObject()
|
static |
◆ determineMatching2D()
|
virtualinherited |
Computes the matching between this and another 2D point map, which includes finding:
- The set of points pairs in each map
- The mean squared distance between corresponding pairs.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
This method is the most time critical one into ICP-like algorithms.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented in mrpt::maps::CPointsMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CBeaconMap, and mrpt::maps::CMultiMetricMap.
Definition at line 132 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
Referenced by mrpt::slam::CICP::ICP_Method_Classic().
◆ determineMatching3D()
|
virtualinherited |
Computes the matchings between this and another 3D points map - method used in 3D-ICP.
This method finds the set of point pairs in each map.
The method is the most time critical one into ICP-like algorithms.
The algorithm is:
- For each point in "otherMap":
- Transform the point according to otherMapPose
- Search with a KD-TREE the closest correspondences in "this" map.
- Add to the set of candidate matchings, if it passes all the thresholds in params.
- Parameters
-
otherMap [IN] The other map to compute the matching with. otherMapPose [IN] The pose of the other map as seen from "this". params [IN] Parameters for the determination of pairings. correspondences [OUT] The detected matchings pairs. extraResults [OUT] Other results.
- See also
- compute3DMatchingRatio
Reimplemented in mrpt::maps::CPointsMap.
Definition at line 150 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
Referenced by mrpt::slam::CICP::ICP3D_Method_Classic().
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ dyngridcommon_readFromStream()
|
inlineprotectedinherited |
Definition at line 300 of file CDynamicGrid.h.
◆ dyngridcommon_writeToStream()
|
inlineprotectedinherited |
Definition at line 295 of file CDynamicGrid.h.
◆ enableProfiler()
|
inlineinherited |
Definition at line 328 of file maps/CRandomFieldGridMap2D.h.
References mrpt::graphs::ScalarFactorGraph::enableProfiler(), and mrpt::maps::CRandomFieldGridMap2D::m_gmrf.
◆ enableVerbose()
|
inlineinherited |
Definition at line 325 of file maps/CRandomFieldGridMap2D.h.
◆ exist_relation_between2cells()
|
protectedinherited |
Check if two cells of the gridmap (m_map) are connected, based on the provided occupancy gridmap.
Definition at line 2217 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::COccupancyGridMap2D::getCell(), mrpt::maps::COccupancyGridMap2D::getSizeX(), mrpt::maps::COccupancyGridMap2D::getSizeY(), and min.
◆ fill()
|
inlineinherited |
Fills all the cells with the same value.
Definition at line 101 of file CDynamicGrid.h.
◆ getAs3DObject() [1/2]
|
virtual |
Returns two 3D objects representing the mean and variance maps.
Reimplemented from mrpt::maps::CRandomFieldGridMap2D.
Definition at line 526 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::TMapGenericParams::enableSaveAs3DObject, mrpt::maps::CMetricMap::genericMapParams, mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), MRPT_END, and MRPT_START.
◆ getAs3DObject() [2/2]
|
virtual |
Returns a 3D object representing the map.
Reimplemented from mrpt::maps::CRandomFieldGridMap2D.
Definition at line 515 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::TMapGenericParams::enableSaveAs3DObject, mrpt::maps::CMetricMap::genericMapParams, mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), MRPT_END, and MRPT_START.
◆ getAsBitmapFile()
|
virtualinherited |
Returns an image just as described in saveAsBitmapFile.
Definition at line 714 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), MRPT_END, MRPT_START, and mrpt::utils::CImage::setFromMatrix().
Referenced by mrpt::maps::CRandomFieldGridMap2D::saveAsBitmapFile().
◆ getAsMatlab3DGraphScript()
|
inherited |
Return a large text block with a MATLAB script to plot the contents of this map.
- See also
- saveAsMatlab3DGraph This method can only be called in a KF map model
◆ getAsMatrix() [1/2]
|
inlineinherited |
Get the entire grid as a matrix.
- Template Parameters
-
MAT The type of the matrix, typically a mrpt::math::CMatrixDouble.
- Parameters
-
[out] m The output matrix; will be set automatically to the correct size. Entry (cy,cx) in the matrix contains the grid cell with indices (cx,cy).
- Note
- This method will compile only for cell types that can be converted to the type of the matrix elements (e.g. double).
Definition at line 263 of file CDynamicGrid.h.
◆ getAsMatrix() [2/2]
|
virtualinherited |
Like saveAsBitmapFile(), but returns the data in matrix form (first row in the matrix is the upper (y_max) part of the map)
Like saveAsBitmapFile(), but returns the data in matrix form.
Definition at line 672 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByIndex(), mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), mrpt::maps::TRandomFieldCell::gmrf_mean, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_min, mrpt::maps::TRandomFieldCell::kf_mean, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_y, mrpt::maps::CRandomFieldGridMap2D::mrGMRF_SD, mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, mrpt::maps::CRandomFieldGridMap2D::mrKernelDM, mrpt::maps::CRandomFieldGridMap2D::mrKernelDMV, MRPT_END, MRPT_START, mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::utils::saturate(), and THROW_EXCEPTION.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAsBitmapFile().
◆ getAsSimplePointsMap() [1/2]
|
inlinevirtualinherited |
Reimplemented in mrpt::maps::CMultiMetricMap, mrpt::maps::CSimplePointsMap, and mrpt::maps::CPointsMap.
Definition at line 241 of file maps/CMetricMap.h.
◆ getAsSimplePointsMap() [2/2]
|
inlinevirtualinherited |
If the map is a simple points map or it's a multi-metric map that contains EXACTLY one simple points map, return it.
Otherwise, return NULL
Reimplemented in mrpt::maps::CMultiMetricMap, mrpt::maps::CSimplePointsMap, and mrpt::maps::CPointsMap.
Definition at line 240 of file maps/CMetricMap.h.
Referenced by mrpt::maps::CPointsMap::compute3DMatchingRatio().
◆ getCommonInsertOptions()
|
inlineprotectedvirtual |
Get the part of the options common to all CRandomFieldGridMap2D classes.
Implements mrpt::maps::CRandomFieldGridMap2D.
Definition at line 128 of file maps/CGasConcentrationGridMap2D.h.
◆ getMapType()
|
inherited |
Return the type of the random-field grid map, according to parameters passed on construction.
Definition at line 2091 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::m_mapType.
◆ getMeanAndCov()
|
inherited |
Return the mean and covariance vector of the full Kalman filter estimate (works for all KF-based methods).
Definition at line 2041 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::m_cov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, and mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov().
◆ getMeanAndSTD()
|
inherited |
Return the mean and STD vectors of the full Kalman filter estimate (works for all KF-based methods).
Definition at line 2057 of file CRandomFieldGridMap2D.cpp.
References mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, and mrpt::maps::CRandomFieldGridMap2D::m_stackedCov.
◆ getResolution()
|
inlineinherited |
Returns the resolution of the grid map.
Definition at line 238 of file CDynamicGrid.h.
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::maps::CRandomFieldGridMap2D.
◆ getSizeX()
|
inlineinherited |
Returns the horizontal size of grid map in cells count.
Definition at line 220 of file CDynamicGrid.h.
◆ getSizeY()
|
inlineinherited |
Returns the vertical size of grid map in cells count.
Definition at line 223 of file CDynamicGrid.h.
◆ getWindAs3DObject()
| void CGasConcentrationGridMap2D::getWindAs3DObject | ( | mrpt::opengl::CSetOfObjectsPtr & | windObj | ) | const |
Returns the 3D object representing the wind grid information.
Definition at line 539 of file CGasConcentrationGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< T >::cellByPos(), mrpt::opengl::CArrow::Create(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getResolution(), mrpt::utils::CDynamicGrid< T >::getSizeX(), mrpt::utils::CDynamicGrid< T >::getSizeY(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getXMax(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getXMin(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getYMax(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getYMin(), mrpt::utils::jet2rgb(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, windGrid_direction, and windGrid_module.
◆ getXMax()
|
inlineinherited |
Returns the "x" coordinate of right side of grid map.
Definition at line 229 of file CDynamicGrid.h.
◆ getXMin()
|
inlineinherited |
Returns the "x" coordinate of left side of grid map.
Definition at line 226 of file CDynamicGrid.h.
◆ getYMax()
|
inlineinherited |
Returns the "y" coordinate of bottom side of grid map.
Definition at line 235 of file CDynamicGrid.h.
◆ getYMin()
|
inlineinherited |
Returns the "y" coordinate of top side of grid map.
Definition at line 232 of file CDynamicGrid.h.
◆ hasSubscribers()
|
inlineprotectedinherited |
Can be called by a derived class before preparing an event for publishing with publishEvent to determine if there is no one subscribed, so it can save the wasted time preparing an event that will be not read.
Definition at line 52 of file CObservable.h.
Referenced by mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ idx2cxcy()
|
inlineinherited |
Transform a global (linear) cell index value into its corresponding (x,y) cell indexes.
Definition at line 246 of file CDynamicGrid.h.
◆ idx2x()
|
inlineinherited |
Transform a cell index into a coordinate value of the cell central point.
Definition at line 253 of file CDynamicGrid.h.
◆ idx2y()
|
inlineinherited |
Definition at line 254 of file CDynamicGrid.h.
◆ increaseUncertainty()
|
virtual |
Increase the kf_std of all cells from the m_map This mehod is usually called by the main_map to simulate loss of confidence in measurements when time passes.
Definition at line 603 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, and mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov().
Referenced by simulateAdvection().
◆ insertIndividualReading()
|
inherited |
Direct update of the map with a reading in a given position of the map, using the appropriate method according to mapType passed in the constructor.
This is a direct way to update the map, an alternative to the generic insertObservation() method which works with mrpt::obs::CObservation objects.
- Parameters
-
[in] sensorReading The value observed in the (x,y) position [in] point The (x,y) location [in] update_map Run a global map update after inserting this observatin (algorithm-dependant) [in] time_invariant Whether the observation "vanishes" with time (false) or not (true) [Only for GMRF methods] [in] reading_stddev The uncertainty (standard deviation) of the reading. Default="0.0" means use the default settings per map-wide parameters.
Definition at line 2115 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_lambdaObs, mrpt::maps::CRandomFieldGridMap2D::insertObservation_GMRF(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KernelDM_DMV(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::maps::CRandomFieldGridMap2D::mrGMRF_SD, mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, mrpt::maps::CRandomFieldGridMap2D::mrKernelDM, mrpt::maps::CRandomFieldGridMap2D::mrKernelDMV, mrpt::math::square(), and THROW_EXCEPTION.
Referenced by internal_insertObservation().
◆ insertObservation()
|
inherited |
Insert the observation information into this map.
This method must be implemented in derived classes. See: Maps and observations compatibility matrix
- Parameters
-
obs The observation robotPose The 3D pose of the robot mobile base in the map reference system, or NULL (default) if you want to use the origin.
- See also
- CObservation::insertObservationInto
Definition at line 102 of file CMetricMap.cpp.
Referenced by ICPTests::align2scans(), mrpt::maps::COccupancyGridMap2D::computeObservationLikelihood_likelihoodField_Thrun(), mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::getICPEdge(), CAngularObservationMesh_fnctr::operator()(), TEST(), and mrpt::graphslam::CGraphSlamEngine< GRAPH_T >::updateMapVisualization().
◆ insertObservation_GMRF()
|
protectedinherited |
The implementation of "insertObservation" for the Gaussian Markov Random Field map model.
- Parameters
-
normReading Is a [0,1] normalized concentration reading. point Is the sensor location on the map
Definition at line 2139 of file CRandomFieldGridMap2D.cpp.
References mrpt::graphs::ScalarFactorGraph::addConstraint(), ASSERT_, mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByPos(), mrpt::maps::CRandomFieldGridMap2D::TObservationGMRF::Lambda, mrpt::maps::CRandomFieldGridMap2D::m_gmrf, mrpt::maps::CRandomFieldGridMap2D::m_mrf_factors_activeObs, mrpt::graphs::ScalarFactorGraph::UnaryFactorVirtualBase::node_id, mrpt::maps::CRandomFieldGridMap2D::TObservationGMRF::obsValue, mrpt::maps::CRandomFieldGridMap2D::TObservationGMRF::time_invariant, mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF(), mrpt::math::TPoint2D::x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::xy2idx(), and mrpt::math::TPoint2D::y.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading().
◆ insertObservation_KernelDM_DMV()
|
protectedinherited |
The implementation of "insertObservation" for Achim Lilienthal's map models DM & DM+V.
- Parameters
-
normReading Is a [0,1] normalized concentration reading. point Is the sensor location on the map is_DMV = false -> map type is Kernel DM; true -> map type is DM+V normReading Is a [0,1] normalized concentration reading. is_DMV = false -> map type is Kernel DM; true -> map type is DM+V
Definition at line 480 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::maps::TRandomFieldCell::dm_mean, mrpt::maps::TRandomFieldCell::dm_mean_w, mrpt::maps::TRandomFieldCell::dmv_var_mean, MRPT_END, MRPT_LOG_DEBUG, MRPT_LOG_DEBUG_FMT, MRPT_START, mrpt::utils::round(), mrpt::math::square(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading().
◆ insertObservation_KF()
|
protectedinherited |
The implementation of "insertObservation" for the (whole) Kalman Filter map model.
- Parameters
-
normReading Is a [0,1] normalized concentration reading. point Is the sensor location on the map
Definition at line 998 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByPos(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_defaultCellMeanValue, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd, mrpt::maps::TRandomFieldCell::kf_mean, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_observationModelNoise, mrpt::maps::CRandomFieldGridMap2D::m_cov, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::system::os::memcpy(), MRPT_END, MRPT_LOG_DEBUG, MRPT_LOG_DEBUG_FMT, MRPT_START, mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::math::square(), mrpt::utils::CTicTac::Tac(), mrpt::utils::CTicTac::Tic(), mrpt::math::TPoint2D::x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::xy2idx(), and mrpt::math::TPoint2D::y.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading().
◆ insertObservation_KF2()
|
protectedinherited |
The implementation of "insertObservation" for the Efficient Kalman Filter map model.
- Parameters
-
normReading Is a [0,1] normalized concentration reading. point Is the sensor location on the map
Definition at line 1818 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByPos(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2cxcy(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_covSigma, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_defaultCellMeanValue, mrpt::maps::TRandomFieldCell::kf_mean, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_observationModelNoise, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_W_size, mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_resolution, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_y, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, min, MRPT_END, MRPT_LOG_DEBUG, MRPT_LOG_DEBUG_FMT, MRPT_LOG_DEBUG_STREAM, MRPT_START, mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::math::square(), mrpt::utils::CTicTac::Tac(), THROW_EXCEPTION_FMT, mrpt::utils::CTicTac::Tic(), mrpt::math::TPoint2D::x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::x2idx(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::xy2idx(), mrpt::math::TPoint2D::y, and mrpt::utils::CDynamicGrid< TRandomFieldCell >::y2idx().
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading().
◆ insertObservationPtr()
|
inherited |
A wrapper for smart pointers, just calls the non-smart pointer version.
See: Maps and observations compatibility matrix
Definition at line 118 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, and THROW_EXCEPTION.
Referenced by mrpt::slam::CMetricMapBuilderICP::processObservation().
◆ internal_canComputeObservationLikelihood()
|
inlineprivatevirtualinherited |
Internal method called by canComputeObservationLikelihood()
Reimplemented in mrpt::maps::CMultiMetricMap, and mrpt::maps::COccupancyGridMap2D.
Definition at line 71 of file maps/CMetricMap.h.
References MRPT_UNUSED_PARAM.
◆ internal_clear()
|
protectedvirtual |
Erase all the contents of the map.
Reimplemented from mrpt::maps::CRandomFieldGridMap2D.
Definition at line 125 of file CGasConcentrationGridMap2D.cpp.
References build_Gaussian_Wind_Grid(), mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::default_wind_direction, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::default_wind_speed, mrpt::utils::CDynamicGrid< T >::fill(), insertionOptions, mrpt::maps::CRandomFieldGridMap2D::internal_clear(), THROW_EXCEPTION, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::useWindInformation, windGrid_direction, and windGrid_module.
◆ internal_computeObservationLikelihood()
|
protectedvirtual |
Internal method called by computeObservationLikelihood()
Implements mrpt::maps::CMetricMap.
Definition at line 258 of file CGasConcentrationGridMap2D.cpp.
References MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ internal_CreateFromMapDefinition()
|
static |
Definition at line 74 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::insertionOpts, mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::mapType, mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::max_x, mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::max_y, mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::min_x, mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::min_y, and mrpt::maps::CGasConcentrationGridMap2D::TMapDefinition::resolution.
◆ internal_insertObservation()
|
protectedvirtual |
Internal method called by insertObservation()
Implements mrpt::maps::CMetricMap.
Definition at line 164 of file CGasConcentrationGridMap2D.cpp.
References ASSERT_, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::enose_id, mrpt::obs::CObservationGasSensors::TObservationENose::eNosePoseOnTheRobot, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::gasSensorLabel, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::gasSensorType, mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading(), insertionOptions, IS_CLASS, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_count, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_mean, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_var, mrpt::obs::CObservationGasSensors::m_readings, mrpt::math::mean(), MRPT_END, MRPT_START, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_min, mrpt::obs::CObservationGasSensors::TObservationENose::readingsVoltage, mrpt::obs::CObservation::sensorLabel, mrpt::obs::CObservationGasSensors::TObservationENose::sensorTypes, mrpt::math::square(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
◆ internal_observer_begin()
Definition at line 33 of file CObservable.cpp.
◆ internal_observer_end()
Definition at line 38 of file CObservable.cpp.
References ASSERTMSG_, MRPT_END, and MRPT_START.
◆ isEmpty()
|
virtualinherited |
Returns true if the map is empty/no observation has been inserted (in this class it always return false, unless redefined otherwise in base classes)
Implements mrpt::maps::CMetricMap.
Definition at line 467 of file CRandomFieldGridMap2D.cpp.
◆ isEnabledVerbose()
|
inlineinherited |
Definition at line 326 of file maps/CRandomFieldGridMap2D.h.
◆ isProfilerEnabled()
|
inlineinherited |
Definition at line 329 of file maps/CRandomFieldGridMap2D.h.
References mrpt::graphs::ScalarFactorGraph::isProfilerEnabled(), and mrpt::maps::CRandomFieldGridMap2D::m_gmrf.
◆ load_Gaussian_Wind_Grid_From_File()
|
protected |
Definition at line 1236 of file CGasConcentrationGridMap2D.cpp.
References ASSERT_, mrpt::maps::CGasConcentrationGridMap2D::TGaussianCell::cx, mrpt::maps::CGasConcentrationGridMap2D::TGaussianCell::cy, mrpt::utils::CFileGZInputStream::fileOpenCorrectly(), mrpt::format(), LUT, LUT_TABLE, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::max_r, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::resolution, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::std_phi, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::std_r, and mrpt::maps::CGasConcentrationGridMap2D::TGaussianCell::value.
Referenced by build_Gaussian_Wind_Grid().
◆ loadFromProbabilisticPosesAndObservations()
|
inherited |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is automaticed invoking "insertObservation" for each observation at the mean 3D robot pose as given by the "poses::CPosePDF" in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 48 of file CMetricMap.cpp.
References mrpt::utils::clear(), mrpt::maps::CSimpleMap::get(), and mrpt::maps::CSimpleMap::size().
Referenced by run_test_pf_localization().
◆ loadFromSimpleMap()
|
inlineinherited |
Load the map contents from a CSimpleMap object, erasing all previous content of the map.
This is automaticed invoking "insertObservation" for each observation at the mean 3D robot pose as given by the "poses::CPosePDF" in the CSimpleMap object.
- See also
- insertObservation, CSimpleMap
- Exceptions
-
std::exception Some internal steps in invoked methods can raise exceptions on invalid parameters, etc...
Definition at line 105 of file maps/CMetricMap.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::internal_clear().
◆ m_map_castaway_const()
|
inlineprotectedinherited |
Used only from logically const method that really need to modify the object.
Definition at line 45 of file CDynamicGrid.h.
◆ MapDefinition()
|
static |
Returns default map definition initializer.
See mrpt::maps::TMetricMapInitializer
Definition at line 36 of file CGasConcentrationGridMap2D.cpp.
◆ OnPostSuccesfulInsertObs()
|
inlineprivatevirtualinherited |
Hook for each time a "internal_insertObservation" returns "true" This is called automatically from insertObservation() when internal_insertObservation returns true.
Reimplemented in mrpt::maps::COccupancyGridMap2D.
Definition at line 79 of file maps/CMetricMap.h.
◆ operator delete() [1/3]
|
inline | ||||||||||||||||||||
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator delete() [2/3]
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator delete[]()
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator new() [1/3]
|
inline |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator new() [3/3]
|
inlinestatic |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ operator new[]()
|
inline |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ predictMeasurement()
|
virtualinherited |
Returns the prediction of the measurement at some (x,y) coordinates, and its certainty (in the form of the expected variance).
- Parameters
-
[in] x Query X coordinate [in] y Query Y coordinate [out] out_predict_response The output value [out] out_predict_response_variance The output variance [in] do_sensor_normalization Whether to renormalize the prediction to a predefined interval (`R` values in insertionOptions) [in] interp_method Interpolation method
Definition at line 1683 of file CRandomFieldGridMap2D.cpp.
References mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByIndex(), mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeVarCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::gimBilinear, mrpt::maps::CRandomFieldGridMap2D::gimNearest, mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2x(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2y(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_defaultCellMeanValue, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd, mrpt::maps::TRandomFieldCell::kf_mean, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_observationModelNoise, mrpt::maps::TRandomFieldCell::kf_std, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_mean, mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_resolution, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_max, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_min, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_y_min, mrpt::maps::CRandomFieldGridMap2D::mrGMRF_SD, mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, mrpt::maps::CRandomFieldGridMap2D::mrKernelDM, mrpt::maps::CRandomFieldGridMap2D::mrKernelDMV, MRPT_END, MRPT_START, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_min, mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::math::square(), THROW_EXCEPTION, mrpt::utils::CDynamicGrid< TRandomFieldCell >::x2idx(), and mrpt::utils::CDynamicGrid< TRandomFieldCell >::y2idx().
◆ publishEvent()
Called when you want this object to emit an event to all the observers currently subscribed to this object.
Definition at line 49 of file CObservable.cpp.
References MRPT_END, and MRPT_START.
Referenced by mrpt::gui::CDisplayWindow3D::internal_emitGrabImageEvent(), mrpt::gui::CWindowDialog::OnChar(), mrpt::gui::CWindowDialog::OnClose(), mrpt::gui::C3DWindowDialog::OnClose(), mrpt::gui::CWindowDialog::OnMouseDown(), mrpt::gui::CWindowDialog::OnMouseMove(), mrpt::gui::CWindowDialog::OnResize(), mrpt::gui::C3DWindowDialog::OnResize(), and mrpt::opengl::COpenGLViewport::render().
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 330 of file CGasConcentrationGridMap2D.cpp.
References ASSERT_, ASSERT_EQUAL_, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::cutoffRadius, mrpt::utils::CDynamicGrid< TRandomFieldCell >::dyngridcommon_readFromStream(), mrpt::maps::CMetricMap::genericMapParams, insertionOptions, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_covSigma, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_defaultCellMeanValue, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_observationModelNoise, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_W_size, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_count, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_mean, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_var, mrpt::maps::CRandomFieldGridMap2D::m_cov, mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, mean(), MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_min, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::sigma, and version.
◆ recoverMeanAndCov()
|
protectedinherited |
In the KF2 implementation, takes the auxiliary matrices and from them update the cells' mean and std values.
- See also
- m_hasToRecoverMeanAndCov
Definition at line 2026 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map_castaway_const(), mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, and mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::getMeanAndCov(), increaseUncertainty(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile(), mrpt::maps::CRandomFieldGridMap2D::setMeanAndSTD(), and simulateAdvection().
◆ resize() [1/2]
|
virtualinherited |
Changes the size of the grid, maintaining previous contents.
- See also
- setSize
Definition at line 726 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2cxcy(), mrpt::math::isNaN(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_covSigma, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd, mrpt::maps::TRandomFieldCell::kf_std, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_W_size, mrpt::maps::CRandomFieldGridMap2D::m_cov, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_resolution, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_y, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_min, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_y_min, mrpt::system::os::memcpy(), mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, MRPT_END, MRPT_END_WITH_CLEAN_UP, MRPT_LOG_DEBUG_FMT, MRPT_START, mrpt::utils::round(), and mrpt::math::square().
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), and mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2().
◆ resize() [2/2]
|
inlinevirtualinherited |
Changes the size of the grid, maintaining previous contents.
- See also
- setSize
Definition at line 109 of file CDynamicGrid.h.
◆ save_Gaussian_Wind_Grid_To_File()
|
protected |
Definition at line 1175 of file CGasConcentrationGridMap2D.cpp.
References CFileGZOutputStream, mrpt::format(), LUT, LUT_TABLE, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::max_r, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::resolution, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::std_phi, and mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::std_r.
Referenced by build_Gaussian_Wind_Grid().
◆ saveAsBitmapFile()
|
virtualinherited |
Save the current map as a graphical file (BMP,PNG,...).
The file format will be derived from the file extension (see CImage::saveToFile ) It depends on the map representation model: mrAchim: Each pixel is the ratio  mrKalmanFilter: Each pixel is the mean value of the Gaussian that represents each cell.
mrKalmanFilter: Each pixel is the mean value of the Gaussian that represents each cell.
- See also
- getAsBitmapFile()
Definition at line 660 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::getAsBitmapFile(), MRPT_END, and MRPT_START.
Referenced by mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile().
◆ saveAsMatlab3DGraph()
|
virtualinherited |
Save a matlab ".m" file which represents as 3D surfaces the mean and a given confidence level for the concentration of each cell.
This method can only be called in a KF map model.
- See also
- getAsMatlab3DGraphScript
Definition at line 1235 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByIndex(), mrpt::system::os::fclose(), mrpt::system::os::fopen(), mrpt::system::os::fprintf(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_min, mrpt::maps::TRandomFieldCell::kf_mean, mrpt::maps::TRandomFieldCell::kf_std, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_resolution, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_y, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_max, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_min, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_y_max, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_y_min, mrpt::maps::CRandomFieldGridMap2D::mrGMRF_SD, mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, MRPT_END, MRPT_START, mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::utils::saturate_val(), and THROW_EXCEPTION.
Referenced by mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile().
◆ saveMetricMapRepresentationToFile()
|
virtualinherited |
The implementation in this class just calls all the corresponding method of the contained metric maps.
Implements mrpt::maps::CMetricMap.
Definition at line 1112 of file CRandomFieldGridMap2D.cpp.
References mrpt::utils::CDynamicGrid< TRandomFieldCell >::cellByIndex(), mrpt::maps::CRandomFieldGridMap2D::computeConfidenceCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeVarCellValue_DM_DMV(), mrpt::maps::TRandomFieldCell::gmrf_mean, mrpt::maps::TRandomFieldCell::gmrf_std, mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2x(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2y(), mrpt::maps::TRandomFieldCell::kf_mean, mrpt::maps::TRandomFieldCell::kf_std, mrpt::maps::CRandomFieldGridMap2D::m_cov, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_x, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_size_y, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_max, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_x_min, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_y_max, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_y_min, mrpt::math::MATRIX_FORMAT_FIXED, mrpt::maps::CRandomFieldGridMap2D::mrGMRF_SD, mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, mrpt::maps::CRandomFieldGridMap2D::mrKernelDM, mrpt::maps::CRandomFieldGridMap2D::mrKernelDMV, mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::maps::CRandomFieldGridMap2D::saveAsBitmapFile(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), mrpt::utils::CImage::saveToFile(), and THROW_EXCEPTION.
◆ saveToTextFile()
|
inlineinherited |
Saves a float representation of the grid (via "cell2float()") to a text file.
- Returns
- false on error
Definition at line 280 of file CDynamicGrid.h.
◆ setCellsConnectivity()
|
inherited |
Sets a custom object to define the connectivity between cells.
Must call clear() or setSize() afterwards for the changes to take place.
Definition at line 77 of file CRandomFieldGridMap2D.cpp.
◆ setMeanAndSTD()
|
inherited |
Load the mean and STD vectors of the full Kalman filter estimate (works for all KF-based methods).
Definition at line 2074 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), and mrpt::math::square().
◆ setSize() [1/2]
|
inlineinherited |
Changes the size of the grid, ERASING all previous contents.
If fill_value is left as NULL, the contents of cells may be undefined (some will remain with their old values, the new ones will have the default cell value, but the location of old values may change wrt their old places). If fill_value is not NULL, it is assured that all cells will have a copy of that value after resizing.
Definition at line 69 of file CDynamicGrid.h.
◆ setSize() [2/2]
|
virtualinherited |
Changes the size of the grid, erasing previous contents.
- Parameters
-
[in] connectivity_descriptor Optional user-supplied object that will visit all grid cells to define their connectivity with neighbors and the strength of existing edges. If present, it overrides all options in insertionOptions
Definition at line 71 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CMetricMap::clear(), and setSize().
◆ simulateAdvection()
| bool CGasConcentrationGridMap2D::simulateAdvection | ( | const double & | STD_increase_value | ) |
Implements the transition model of the gasConcentration map using the information of the wind maps
Definition at line 634 of file CGasConcentrationGridMap2D.cpp.
References ASSERT_, mrpt::utils::CDynamicGrid< T >::cellByIndex(), mrpt::utils::CDynamicGrid< T >::getSizeX(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getSizeX(), mrpt::utils::CDynamicGrid< T >::getSizeY(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::getSizeY(), mrpt::utils::CDynamicGrid< TRandomFieldCell >::idx2cxcy(), increaseUncertainty(), insertionOptions, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd, LUT, LUT_TABLE, mrpt::maps::CRandomFieldGridMap2D::m_hasToRecoverMeanAndCov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::max_r, mrpt::system::now(), mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::phi_inc, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_count, mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable::r_inc, mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::utils::round(), mrpt::math::square(), mrpt::utils::CTicTac::Tac(), mrpt::utils::CTicTac::Tic(), mrpt::system::timeDifference(), timeLastSimulated, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions::useWindInformation, windGrid_direction, and windGrid_module.
◆ squareDistanceToClosestCorrespondence()
|
virtualinherited |
Returns the square distance from the 2D point (x0,y0) to the closest correspondence in the map.
Reimplemented in mrpt::maps::CPointsMap.
Definition at line 178 of file CMetricMap.cpp.
References MRPT_END, MRPT_START, MRPT_UNUSED_PARAM, and THROW_EXCEPTION.
◆ updateMapEstimation()
|
inherited |
Run the method-specific procedure required to ensure that the mean & variances are up-to-date with all inserted observations.
Definition at line 2096 of file CRandomFieldGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::maps::CRandomFieldGridMap2D::mrGMRF_SD, mrpt::maps::CRandomFieldGridMap2D::mrKalmanApproximate, mrpt::maps::CRandomFieldGridMap2D::mrKalmanFilter, mrpt::maps::CRandomFieldGridMap2D::mrKernelDM, mrpt::maps::CRandomFieldGridMap2D::mrKernelDMV, THROW_EXCEPTION, and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ updateMapEstimation_GMRF()
|
protectedinherited |
solves the minimum quadratic system to determine the new concentration of each cell
Definition at line 2173 of file CRandomFieldGridMap2D.cpp.
References ASSERT_, mrpt::graphs::ScalarFactorGraph::eraseConstraint(), mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_lambdaObsLoss, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_saturate_min, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::GMRF_skip_variance, mrpt::maps::CRandomFieldGridMap2D::m_gmrf, mrpt::maps::CRandomFieldGridMap2D::m_insertOptions_common, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_mrf_factors_activeObs, mrpt::utils::saturate(), and mrpt::graphs::ScalarFactorGraph::updateEstimation().
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_GMRF(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 270 of file CGasConcentrationGridMap2D.cpp.
References mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::cutoffRadius, mrpt::utils::CDynamicGrid< TRandomFieldCell >::dyngridcommon_writeToStream(), mrpt::maps::CMetricMap::genericMapParams, insertionOptions, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_covSigma, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_defaultCellMeanValue, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_initialCellStd, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_observationModelNoise, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::KF_W_size, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_count, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_mean, mrpt::maps::CRandomFieldGridMap2D::m_average_normreadings_var, mrpt::maps::CRandomFieldGridMap2D::m_cov, mrpt::utils::CDynamicGrid< TRandomFieldCell >::m_map, mrpt::maps::CRandomFieldGridMap2D::m_mapType, mrpt::maps::CRandomFieldGridMap2D::m_stackedCov, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_max, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::R_min, mrpt::maps::CRandomFieldGridMap2D::TInsertionOptionsCommon::sigma, version, and mrpt::utils::CStream::WriteBuffer().
◆ x2idx()
|
inlineinherited |
Transform a coordinate values into cell indexes.
Definition at line 241 of file CDynamicGrid.h.
◆ xy2idx()
|
inlineinherited |
Definition at line 243 of file CDynamicGrid.h.
◆ y2idx()
|
inlineinherited |
Definition at line 242 of file CDynamicGrid.h.
Member Data Documentation
◆ _init_CGasConcentrationGridMap2D
|
staticprotected |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ classCGasConcentrationGridMap2D
|
static |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ classCMetricMap
|
staticinherited |
Definition at line 57 of file maps/CMetricMap.h.
◆ classCObject
|
staticinherited |
◆ classCRandomFieldGridMap2D
|
staticinherited |
Definition at line 122 of file maps/CRandomFieldGridMap2D.h.
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classinfo
|
static |
Definition at line 37 of file maps/CGasConcentrationGridMap2D.h.
◆ genericMapParams
|
inherited |
Common params to all maps.
Definition at line 227 of file maps/CMetricMap.h.
Referenced by mrpt::maps::internal::TMetricMapTypesRegistry::factoryMapObjectFromDefinition(), mrpt::maps::CBeaconMap::getAs3DObject(), getAs3DObject(), mrpt::maps::CHeightGridMap2D::getAs3DObject(), mrpt::maps::CPointsMap::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CReflectivityGridMap2D::getAs3DObject(), mrpt::maps::CLandmarksMap::getAs3DObject(), readFromStream(), mrpt::maps::CReflectivityGridMap2D::readFromStream(), writeToStream(), and mrpt::maps::CReflectivityGridMap2D::writeToStream().
◆ insertionOptions
| mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions mrpt::maps::CGasConcentrationGridMap2D::insertionOptions |
◆ LUT
| struct MAPS_IMPEXP mrpt::maps::CGasConcentrationGridMap2D::TGaussianWindTable mrpt::maps::CGasConcentrationGridMap2D::LUT |
◆ m_average_normreadings_count
|
protectedinherited |
Definition at line 356 of file maps/CRandomFieldGridMap2D.h.
Referenced by internal_insertObservation(), readFromStream(), and writeToStream().
◆ m_average_normreadings_mean
|
protectedinherited |
Definition at line 355 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), internal_insertObservation(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), readFromStream(), and writeToStream().
◆ m_average_normreadings_var
|
protectedinherited |
Definition at line 355 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::computeVarCellValue_DM_DMV(), internal_insertObservation(), readFromStream(), and writeToStream().
◆ m_cov
|
protectedinherited |
The whole covariance matrix, used for the Kalman Filter map representation.
Definition at line 342 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getMeanAndCov(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), readFromStream(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile(), and writeToStream().
◆ m_DM_gaussWindow
|
protectedinherited |
Definition at line 354 of file maps/CRandomFieldGridMap2D.h.
◆ m_DM_lastCutOff
|
protectedinherited |
Definition at line 353 of file maps/CRandomFieldGridMap2D.h.
◆ m_gmrf
|
protectedinherited |
Definition at line 361 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableProfiler(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_GMRF(), mrpt::maps::CRandomFieldGridMap2D::isProfilerEnabled(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ m_gmrf_connectivity
|
protectedinherited |
Empty: default.
Definition at line 359 of file maps/CRandomFieldGridMap2D.h.
◆ m_hasToRecoverMeanAndCov
|
mutableprotectedinherited |
Only for the KF2 implementation.
Definition at line 349 of file maps/CRandomFieldGridMap2D.h.
Referenced by increaseUncertainty(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), readFromStream(), mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::maps::CRandomFieldGridMap2D::setMeanAndSTD(), and simulateAdvection().
◆ m_insertOptions_common
|
protectedinherited |
Common options to all random-field grid maps: pointer that is set to the derived-class instance of "insertOptions" upon construction of this class.
Definition at line 335 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::computeConfidenceCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeVarCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ m_map
|
protectedinherited |
The cells.
Definition at line 43 of file CDynamicGrid.h.
◆ m_mapType
|
protectedinherited |
The map representation type of this map, as passed in the constructor.
Definition at line 340 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::getMapType(), mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), readFromStream(), mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile(), mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation(), and writeToStream().
◆ m_mrf_factors_activeObs
|
protectedinherited |
Vector with the active observations and their respective Information.
Definition at line 392 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_GMRF(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ m_mrf_factors_priors
|
protectedinherited |
Vector with the precomputed priors for each GMRF model.
Definition at line 393 of file maps/CRandomFieldGridMap2D.h.
◆ m_private_map_register_id
|
static |
ID used to initialize class registration (just ignore it)
Definition at line 155 of file maps/CGasConcentrationGridMap2D.h.
◆ m_resolution
|
protectedinherited |
Definition at line 47 of file CDynamicGrid.h.
◆ m_rfgm_run_update_upon_clear
|
protectedinherited |
Definition at line 332 of file maps/CRandomFieldGridMap2D.h.
◆ m_size_x
|
protectedinherited |
Definition at line 48 of file CDynamicGrid.h.
◆ m_size_y
|
protectedinherited |
Definition at line 48 of file CDynamicGrid.h.
◆ m_stackedCov
|
protectedinherited |
The compressed band diagonal matrix for the KF2 implementation.
The format is a Nx(W^2+2W+1) matrix, one row per cell in the grid map with the cross-covariances between each cell and half of the window around it in the grid.
Definition at line 348 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::getMeanAndSTD(), increaseUncertainty(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), readFromStream(), mrpt::maps::CRandomFieldGridMap2D::recoverMeanAndCov(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CRandomFieldGridMap2D::saveMetricMapRepresentationToFile(), mrpt::maps::CRandomFieldGridMap2D::setMeanAndSTD(), simulateAdvection(), and writeToStream().
◆ m_subscribers
|
privateinherited |
Definition at line 42 of file CObservable.h.
◆ m_x_max
|
protectedinherited |
Definition at line 47 of file CDynamicGrid.h.
◆ m_x_min
|
protectedinherited |
Definition at line 47 of file CDynamicGrid.h.
◆ m_y_max
|
protectedinherited |
Definition at line 47 of file CDynamicGrid.h.
◆ m_y_min
|
protectedinherited |
Definition at line 47 of file CDynamicGrid.h.
◆ timeLastSimulated
|
protected |
The timestamp of the last time the advection simulation was executed.
Definition at line 149 of file maps/CGasConcentrationGridMap2D.h.
Referenced by CGasConcentrationGridMap2D(), and simulateAdvection().
◆ windGrid_direction
|
protected |
Definition at line 146 of file maps/CGasConcentrationGridMap2D.h.
Referenced by CGasConcentrationGridMap2D(), getWindAs3DObject(), internal_clear(), and simulateAdvection().
◆ windGrid_module
|
protected |
Gridmaps of the wind Direction/Module.
Definition at line 146 of file maps/CGasConcentrationGridMap2D.h.
Referenced by CGasConcentrationGridMap2D(), getWindAs3DObject(), internal_clear(), and simulateAdvection().