Detailed Description
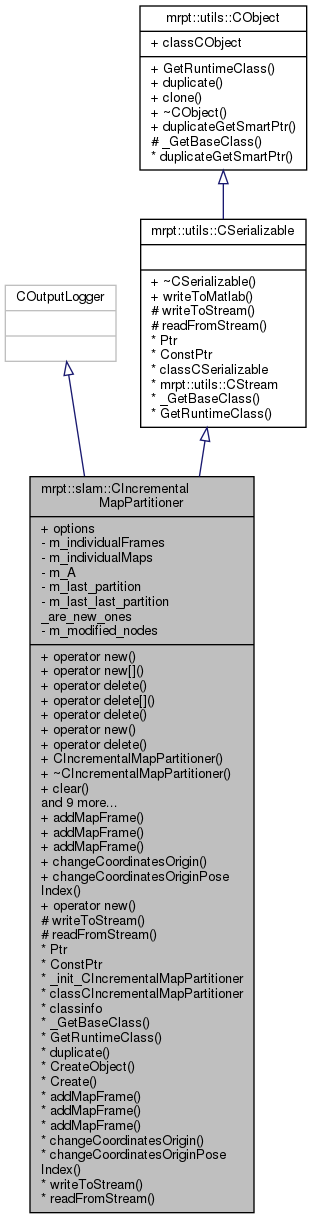
This class can be used to make partitions on a map/graph build from observations taken at some poses/nodes.
Definition at line 30 of file CIncrementalMapPartitioner.h.
#include <mrpt/slam/CIncrementalMapPartitioner.h>
Classes | |
| struct | TOptions |
| Configuration of the algorithm: More... | |
Public Member Functions | |||||
| void * | operator new (size_t size) | ||||
| void * | operator new[] (size_t size) | ||||
| void | operator delete (void *ptr) throw () | ||||
| void | operator delete[] (void *ptr) throw () | ||||
| void | operator delete (void *memory, void *ptr) throw () | ||||
| void * | operator new (size_t size, const std::nothrow_t &) throw () | ||||
| void | operator delete (void *ptr, const std::nothrow_t &) throw () | ||||
| CIncrementalMapPartitioner () | |||||
| ctor More... | |||||
| virtual | ~CIncrementalMapPartitioner () | ||||
| dtor More... | |||||
| void | clear () | ||||
| void | updatePartitions (std::vector< vector_uint > &partitions) | ||||
| This method executed only the neccesary part of the partition to take into account the lastest added frames. More... | |||||
| unsigned int | getNodesCount () | ||||
| Get the total node count currently in the internal map/graph. More... | |||||
| void | removeSetOfNodes (vector_uint indexesToRemove, bool changeCoordsRef=true) | ||||
| Remove the stated nodes (0-based indexes) from the internal lists. More... | |||||
| template<class MATRIX > | |||||
| void | getAdjacencyMatrix (MATRIX &outMatrix) const | ||||
| Return a copy of the internal adjacency matrix. More... | |||||
| const mrpt::math::CMatrixDouble & | getAdjacencyMatrix () const | ||||
| Return a const ref to the internal adjacency matrix. More... | |||||
| const mrpt::maps::CSimpleMap * | getSequenceOfFrames () const | ||||
| Read-only access to the sequence of Sensory Frames. More... | |||||
| mrpt::maps::CSimpleMap * | getSequenceOfFrames () | ||||
| Access to the sequence of Sensory Frames. More... | |||||
| void | markAllNodesForReconsideration () | ||||
| Mark all nodes for reconsideration in the next call to "updatePartitions", instead of considering just those affected by aditions of new arcs. More... | |||||
| void | getAs3DScene (mrpt::opengl::CSetOfObjectsPtr &objs, const std::map< uint32_t, int64_t > *renameIndexes=NULL) const | ||||
| Return a 3D representation of the current state: poses & links between them. More... | |||||
| virtual mxArray * | writeToMatlab () const | ||||
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |||||
| CObject * | clone () const | ||||
| Cloning interface for smart pointers. More... | |||||
Add to the Map Frames | |||||
Add a new frame to the current graph Call this method each time a new observation is added to the map/graph, and whenever you want to update the partitions, call "updatePartitions"
| |||||
| unsigned int | addMapFrame (const mrpt::obs::CSensoryFramePtr &frame, const mrpt::poses::CPosePDFPtr &robotPose2D) | ||||
| unsigned int | addMapFrame (const mrpt::obs::CSensoryFramePtr &frame, const mrpt::poses::CPose3DPDFPtr &robotPose3D) | ||||
| unsigned int | addMapFrame (const mrpt::obs::CSensoryFrame &frame, const mrpt::poses::CPose3DPDF &robotPose3D) | ||||
Change Coordinates System | |||||
Change the coordinate origin of all stored poses Used for consistency with future new poses to enter in the system. | |||||
| void | changeCoordinatesOrigin (const mrpt::poses::CPose3D &newOrigin) | ||||
| void | changeCoordinatesOriginPoseIndex (const unsigned &newOriginPose) | ||||
| The new origin is given by the index of the pose that is to become the new origin. More... | |||||
RTTI classes and functions | |||||
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const | ||||
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |||||
Static Public Member Functions | |
| static void * | operator new (size_t size, void *ptr) |
Public Attributes | |
| mrpt::slam::CIncrementalMapPartitioner::TOptions | options |
Static Public Attributes | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
CSerializable virtual methods | |
| void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| void | readFromStream (mrpt::utils::CStream &in, int version) |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Private Attributes | |
| mrpt::maps::CSimpleMap | m_individualFrames |
| std::deque< mrpt::maps::CMultiMetricMap > | m_individualMaps |
| mrpt::math::CMatrixD | m_A |
| Adjacency matrix. More... | |
| std::vector< vector_uint > | m_last_partition |
| The last partition. More... | |
| bool | m_last_last_partition_are_new_ones |
| This will be true after adding new observations, and before an "updatePartitions" is invoked. More... | |
| std::vector< uint8_t > | m_modified_nodes |
| The list of keyframes to consider in the next update. More... | |
RTTI stuff <br> | |
| typedef CIncrementalMapPartitionerPtr | Ptr |
| typedef CIncrementalMapPartitionerPtr | ConstPtr |
| static mrpt::utils::CLASSINIT | _init_CIncrementalMapPartitioner |
| static mrpt::utils::TRuntimeClassId | classCIncrementalMapPartitioner |
| static const mrpt::utils::TRuntimeClassId * | classinfo |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
| virtual mrpt::utils::CObject * | duplicate () const |
| Returns a copy of the object, indepently of its class. More... | |
| static mrpt::utils::CObject * | CreateObject () |
| static CIncrementalMapPartitionerPtr | Create () |
Member Typedef Documentation
◆ ConstPtr
| typedef CIncrementalMapPartitionerPtr mrpt::slam::CIncrementalMapPartitioner::ConstPtr |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ Ptr
| typedef CIncrementalMapPartitionerPtr mrpt::slam::CIncrementalMapPartitioner::Ptr |
A typedef for the associated smart pointer
Definition at line 35 of file CIncrementalMapPartitioner.h.
Constructor & Destructor Documentation
◆ CIncrementalMapPartitioner()
| CIncrementalMapPartitioner::CIncrementalMapPartitioner | ( | ) |
◆ ~CIncrementalMapPartitioner()
|
virtual |
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ addMapFrame() [1/3]
| unsigned int CIncrementalMapPartitioner::addMapFrame | ( | const mrpt::obs::CSensoryFrame & | frame, |
| const mrpt::poses::CPose3DPDF & | robotPose3D | ||
| ) |
Definition at line 721 of file CIncrementalMapPartitioner.cpp.
References addMapFrame(), and mrpt::utils::CObject::duplicateGetSmartPtr().
◆ addMapFrame() [2/3]
| unsigned int mrpt::slam::CIncrementalMapPartitioner::addMapFrame | ( | const mrpt::obs::CSensoryFramePtr & | frame, |
| const mrpt::poses::CPose3DPDFPtr & | robotPose3D | ||
| ) |
◆ addMapFrame() [3/3]
| unsigned int mrpt::slam::CIncrementalMapPartitioner::addMapFrame | ( | const mrpt::obs::CSensoryFramePtr & | frame, |
| const mrpt::poses::CPosePDFPtr & | robotPose2D | ||
| ) |
◆ changeCoordinatesOrigin()
| void CIncrementalMapPartitioner::changeCoordinatesOrigin | ( | const mrpt::poses::CPose3D & | newOrigin | ) |
Definition at line 582 of file CIncrementalMapPartitioner.cpp.
References mrpt::maps::CSimpleMap::changeCoordinatesOrigin(), and m_individualFrames.
Referenced by changeCoordinatesOriginPoseIndex().
◆ changeCoordinatesOriginPoseIndex()
| void CIncrementalMapPartitioner::changeCoordinatesOriginPoseIndex | ( | const unsigned & | newOriginPose | ) |
The new origin is given by the index of the pose that is to become the new origin.
Definition at line 590 of file CIncrementalMapPartitioner.cpp.
References changeCoordinatesOrigin(), mrpt::maps::CSimpleMap::get(), m_individualFrames, MRPT_END, and MRPT_START.
◆ clear()
| void CIncrementalMapPartitioner::clear | ( | ) |
Definition at line 111 of file CIncrementalMapPartitioner.cpp.
References mrpt::maps::CSimpleMap::clear(), m_A, m_individualFrames, m_individualMaps, m_last_last_partition_are_new_ones, m_last_partition, and m_modified_nodes.
Referenced by mrpt::slam::CRangeBearingKFSLAM::reset().
◆ clone()
|
inlineinherited |
◆ Create()
|
static |
◆ CreateObject()
|
static |
◆ duplicate()
|
virtual |
Returns a copy of the object, indepently of its class.
Implements mrpt::utils::CObject.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ getAdjacencyMatrix() [1/2]
|
inline |
Return a const ref to the internal adjacency matrix.
Definition at line 147 of file CIncrementalMapPartitioner.h.
◆ getAdjacencyMatrix() [2/2]
|
inline |
Return a copy of the internal adjacency matrix.
Definition at line 144 of file CIncrementalMapPartitioner.h.
Referenced by mrpt::hmtslam::CHMTSLAM::generateLogFiles().
◆ getAs3DScene()
| void CIncrementalMapPartitioner::getAs3DScene | ( | mrpt::opengl::CSetOfObjectsPtr & | objs, |
| const std::map< uint32_t, int64_t > * | renameIndexes = NULL |
||
| ) | const |
Return a 3D representation of the current state: poses & links between them.
The previous contents of "objs" will be discarded
Definition at line 608 of file CIncrementalMapPartitioner.cpp.
References ASSERT_, mrpt::opengl::CGridPlaneXY::Create(), mrpt::opengl::CSimpleLine::Create(), mrpt::opengl::CSphere::Create(), mrpt::format(), mrpt::maps::CSimpleMap::get(), m_A, m_individualFrames, mrpt::maps::CSimpleMap::size(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Referenced by mrpt::hmtslam::CHMTSLAM::generateLogFiles().
◆ getNodesCount()
| unsigned int CIncrementalMapPartitioner::getNodesCount | ( | ) |
Get the total node count currently in the internal map/graph.
Definition at line 471 of file CIncrementalMapPartitioner.cpp.
References m_individualFrames, and mrpt::maps::CSimpleMap::size().
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
◆ getSequenceOfFrames() [1/2]
|
inline |
Access to the sequence of Sensory Frames.
Definition at line 159 of file CIncrementalMapPartitioner.h.
◆ getSequenceOfFrames() [2/2]
|
inline |
Read-only access to the sequence of Sensory Frames.
Definition at line 152 of file CIncrementalMapPartitioner.h.
◆ markAllNodesForReconsideration()
| void CIncrementalMapPartitioner::markAllNodesForReconsideration | ( | ) |
Mark all nodes for reconsideration in the next call to "updatePartitions", instead of considering just those affected by aditions of new arcs.
Definition at line 570 of file CIncrementalMapPartitioner.cpp.
References m_last_last_partition_are_new_ones, m_last_partition, and m_modified_nodes.
Referenced by mrpt::hmtslam::CHMTSLAM::areaAbstraction(), and mrpt::slam::CRangeBearingKFSLAM::reconsiderPartitionsNow().
◆ operator delete() [1/3]
|
inline | ||||||||||||||||||||
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator delete() [2/3]
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator delete() [3/3]
|
inline | ||||||||||||||||||||
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator delete[]()
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator new() [1/3]
|
inline |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator new() [2/3]
|
inline | ||||||||||||||||||||
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator new() [3/3]
|
inlinestatic |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ operator new[]()
|
inline |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ readFromStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 679 of file CIncrementalMapPartitioner.cpp.
References m_A, m_individualFrames, m_individualMaps, m_last_last_partition_are_new_ones, m_last_partition, m_modified_nodes, MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, and version.
◆ removeSetOfNodes()
| void CIncrementalMapPartitioner::removeSetOfNodes | ( | vector_uint | indexesToRemove, |
| bool | changeCoordsRef = true |
||
| ) |
Remove the stated nodes (0-based indexes) from the internal lists.
If changeCoordsRef is true, coordinates are changed to leave the first node at (0,0,0).
Definition at line 479 of file CIncrementalMapPartitioner.cpp.
References ASSERT_, mrpt::maps::CSimpleMap::changeCoordinatesOrigin(), mrpt::maps::CSimpleMap::get(), m_A, m_individualFrames, m_individualMaps, m_last_last_partition_are_new_ones, m_last_partition, m_modified_nodes, MRPT_END, MRPT_START, mrpt::maps::CSimpleMap::remove(), and mrpt::maps::CSimpleMap::size().
◆ updatePartitions()
| void CIncrementalMapPartitioner::updatePartitions | ( | std::vector< vector_uint > & | partitions | ) |
This method executed only the neccesary part of the partition to take into account the lastest added frames.
- See also
- addMapFrame
Definition at line 350 of file CIncrementalMapPartitioner.cpp.
References mrpt::slam::CIncrementalMapPartitioner::TOptions::forceBisectionOnly, m_A, m_last_last_partition_are_new_ones, m_last_partition, m_modified_nodes, mrpt::slam::CIncrementalMapPartitioner::TOptions::minimumNumberElementsEachCluster, MRPT_END, MRPT_START, options, and mrpt::slam::CIncrementalMapPartitioner::TOptions::partitionThreshold.
Referenced by mrpt::hmtslam::CHMTSLAM::areaAbstraction(), mrpt::slam::CRangeBearingKFSLAM::processActionObservation(), and mrpt::slam::CRangeBearingKFSLAM::reconsiderPartitionsNow().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedvirtual |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implements mrpt::utils::CSerializable.
Definition at line 703 of file CIncrementalMapPartitioner.cpp.
References m_A, m_individualFrames, m_individualMaps, m_last_last_partition_are_new_ones, m_last_partition, m_modified_nodes, and version.
Member Data Documentation
◆ _init_CIncrementalMapPartitioner
|
staticprotected |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ classCIncrementalMapPartitioner
|
static |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ classCObject
|
staticinherited |
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ classinfo
|
static |
Definition at line 35 of file CIncrementalMapPartitioner.h.
◆ m_A
|
private |
Adjacency matrix.
Definition at line 197 of file CIncrementalMapPartitioner.h.
Referenced by clear(), getAs3DScene(), readFromStream(), removeSetOfNodes(), updatePartitions(), and writeToStream().
◆ m_individualFrames
|
private |
Definition at line 193 of file CIncrementalMapPartitioner.h.
Referenced by changeCoordinatesOrigin(), changeCoordinatesOriginPoseIndex(), clear(), getAs3DScene(), getNodesCount(), readFromStream(), removeSetOfNodes(), and writeToStream().
◆ m_individualMaps
|
private |
Definition at line 194 of file CIncrementalMapPartitioner.h.
Referenced by clear(), readFromStream(), removeSetOfNodes(), and writeToStream().
◆ m_last_last_partition_are_new_ones
|
private |
This will be true after adding new observations, and before an "updatePartitions" is invoked.
Definition at line 204 of file CIncrementalMapPartitioner.h.
Referenced by clear(), markAllNodesForReconsideration(), readFromStream(), removeSetOfNodes(), updatePartitions(), and writeToStream().
◆ m_last_partition
|
private |
The last partition.
Definition at line 200 of file CIncrementalMapPartitioner.h.
Referenced by clear(), markAllNodesForReconsideration(), readFromStream(), removeSetOfNodes(), updatePartitions(), and writeToStream().
◆ m_modified_nodes
|
private |
The list of keyframes to consider in the next update.
Definition at line 207 of file CIncrementalMapPartitioner.h.
Referenced by clear(), markAllNodesForReconsideration(), readFromStream(), removeSetOfNodes(), updatePartitions(), and writeToStream().
◆ options
| mrpt::slam::CIncrementalMapPartitioner::TOptions mrpt::slam::CIncrementalMapPartitioner::options |