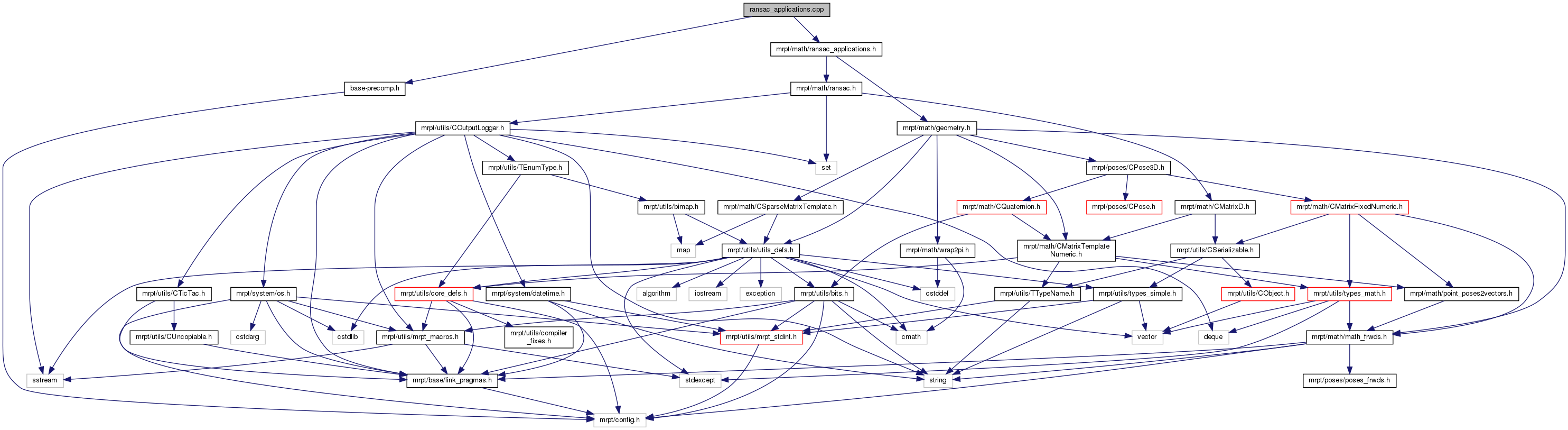
Include dependency graph for ransac_applications.cpp:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Macros | |
| #define | EXPLICIT_INST_ransac_detect_3D_planes(_TYPE_) |
| #define | EXPLICIT_INSTANT_ransac_detect_2D_lines(_TYPE_) |
Functions | |
| template<typename T > | |
| void | mrpt::math::ransac3Dplane_fit (const CMatrixTemplateNumeric< T > &allData, const vector_size_t &useIndices, vector< CMatrixTemplateNumeric< T > > &fitModels) |
| template<typename T > | |
| void | mrpt::math::ransac3Dplane_distance (const CMatrixTemplateNumeric< T > &allData, const vector< CMatrixTemplateNumeric< T > > &testModels, const T distanceThreshold, unsigned int &out_bestModelIndex, vector_size_t &out_inlierIndices) |
| template<typename T > | |
| bool | mrpt::math::ransac3Dplane_degenerate (const CMatrixTemplateNumeric< T > &allData, const mrpt::vector_size_t &useIndices) |
| Return "true" if the selected points are a degenerate (invalid) case. More... | |
| EXPLICIT_INST_ransac_detect_3D_planes (float) EXPLICIT_INST_ransac_detect_3D_planes(double) namespace mrpt | |
Macro Definition Documentation
◆ EXPLICIT_INST_ransac_detect_3D_planes
| #define EXPLICIT_INST_ransac_detect_3D_planes | ( | _TYPE_ | ) |
Value:
const Eigen::Matrix<_TYPE_,Eigen::Dynamic,1> &x, \
const Eigen::Matrix<_TYPE_,Eigen::Dynamic,1> &y, \
const Eigen::Matrix<_TYPE_,Eigen::Dynamic,1> &z, \
vector<pair<size_t,TPlane> > &out_detected_planes, \
const double threshold, \
const size_t min_inliers_for_valid_plane);
Definition at line 182 of file ransac_applications.cpp.
◆ EXPLICIT_INSTANT_ransac_detect_2D_lines
| #define EXPLICIT_INSTANT_ransac_detect_2D_lines | ( | _TYPE_ | ) |
Value:
const Eigen::Matrix<_TYPE_,Eigen::Dynamic,1> &x, \
const Eigen::Matrix<_TYPE_,Eigen::Dynamic,1> &y, \
std::vector<std::pair<size_t,TLine2D> > &out_detected_lines, \
const double threshold, \
const size_t min_inliers_for_valid_line ); \
Definition at line 355 of file ransac_applications.cpp.
Function Documentation
◆ EXPLICIT_INST_ransac_detect_3D_planes()
| EXPLICIT_INST_ransac_detect_3D_planes | ( | float | ) |
Return "true" if the selected points are a degenerate (invalid) case.
Definition at line 191 of file ransac_applications.cpp.
References ASSERT_, ASSERTMSG_, mrpt::math::TLine2D::coefs, mrpt::math::TLine2D::distance(), and MRPT_UNUSED_PARAM.