CObject.h File Reference
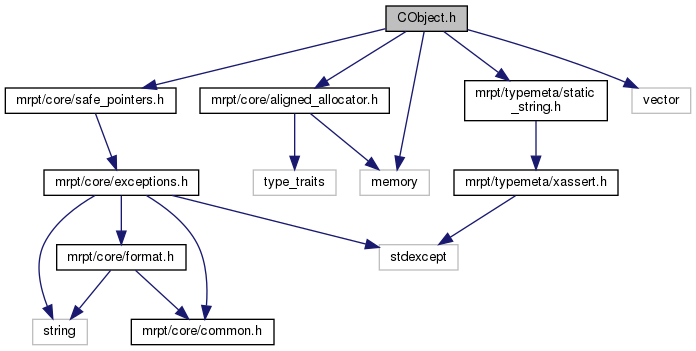
#include <mrpt/core/safe_pointers.h>#include <mrpt/core/aligned_allocator.h>#include <mrpt/typemeta/static_string.h>#include <vector>#include <memory>
Include dependency graph for CObject.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::rtti::TRuntimeClassId |
| A structure that holds runtime class type information. More... | |
| struct | mrpt::rtti::IS_CLASS_impl< T > |
| struct | mrpt::rtti::CLASSINIT |
| Auxiliary structure used for CObject-based RTTI. More... | |
| class | mrpt::rtti::CObject |
| The virtual base class of all MRPT classes with a unified RTTI system. More... | |
| struct | mrpt::ptr_cast< CAST_TO > |
| Converts a polymorphic smart pointer Base::Ptr to Derived::Ptr, in a way compatible with MRPT >=1.5.4 and MRPT 2.x series. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::rtti | |
RTTI classes and functions for polymorphic hierarchies | |
| #define | CLASS_ID(T) mrpt::rtti::CLASS_ID_impl<T>() |
| Access to runtime class ID for a defined class name. More... | |
| #define | CLASS_ID_TEMPLATE(class_name, T) mrpt::rtti::CLASS_ID_impl<T>() |
| #define | CLASS_ID_NAMESPACE(class_name, namespaceName) mrpt::rtti::CLASS_ID_impl<namespaceName::class_name>() |
| #define | IS_CLASS(ptrObj, class_name) mrpt::rtti::IS_CLASS_impl<class_name>::check(ptrObj) |
| Evaluates to true if the given pointer to an object (derived from mrpt::rtti::CObject) is of the given class. More... | |
| #define | IS_DERIVED(ptrObj, class_name) ((ptrObj)->GetRuntimeClass()->derivedFrom(CLASS_ID(class_name))) |
| Evaluates to true if a pointer to an object (derived from mrpt::rtti::CObject) is an instance of the given class OR any of its derived classes. More... | |
| #define | DEFINE_MRPT_OBJECT(class_name) |
| This declaration must be inserted in all CObject classes definition, within the class declaration. More... | |
| #define | IMPLEMENTS_MRPT_OBJECT(class_name, base, NameSpace) |
| This must be inserted in all CObject classes implementation files. More... | |
| #define | DEFINE_VIRTUAL_MRPT_OBJECT(class_name) |
| This declaration must be inserted in virtual CObject classes definition: More... | |
| #define | IMPLEMENTS_VIRTUAL_MRPT_OBJECT(class_name, base_class_name, NameSpace) |
| This must be inserted as implementation of some required members for virtual CObject classes: More... | |
| void | mrpt::rtti::registerClass (const mrpt::rtti::TRuntimeClassId *pNewClass) |
| Register a class into the MRPT internal list of "CObject" descendents. More... | |
| void | mrpt::rtti::registerClassCustomName (const char *customName, const TRuntimeClassId *pNewClass) |
| Mostly for internal use within mrpt sources, to handle exceptional cases with multiple serialization names for backward compatibility (CMultiMetricMaps, CImage,...) More... | |
| std::vector< const mrpt::rtti::TRuntimeClassId * > | mrpt::rtti::getAllRegisteredClasses () |
| Returns a list with all the classes registered in the system through mrpt::rtti::registerClass. More... | |
| std::vector< const TRuntimeClassId * > | mrpt::rtti::getAllRegisteredClassesChildrenOf (const TRuntimeClassId *parent_id) |
| Like getAllRegisteredClasses(), but filters the list to only include children clases of a given base one. More... | |
| const TRuntimeClassId * | mrpt::rtti::findRegisteredClass (const std::string &className) |
| Return info about a given class by its name, or nullptr if the class is not registered. More... | |
| template<typename T > | |
| constexpr const mrpt::rtti::TRuntimeClassId * | mrpt::rtti::CLASS_ID_impl () |
| void | mrpt::rtti::registerAllPendingClasses () |
| Register all pending classes - to be called just before de-serializing an object, for example. More... | |
| mrpt::rtti::CObject * | mrpt::rtti::classFactory (const std::string &className) |
| Creates an object given by its registered name. More... | |
| mrpt::rtti::CObject::Ptr | mrpt::rtti::classFactoryPtr (const std::string &className) |
| Like classFactory() but returns a smart pointer. More... | |
Macro Definition Documentation
◆ CLASS_ID
| #define CLASS_ID | ( | T | ) | mrpt::rtti::CLASS_ID_impl<T>() |
Access to runtime class ID for a defined class name.
- Examples
- rtti_example1/test.cpp.
◆ CLASS_ID_NAMESPACE
| #define CLASS_ID_NAMESPACE | ( | class_name, | |
| namespaceName | |||
| ) | mrpt::rtti::CLASS_ID_impl<namespaceName::class_name>() |
- Examples
- rtti_example1/test.cpp.
◆ CLASS_ID_TEMPLATE
| #define CLASS_ID_TEMPLATE | ( | class_name, | |
| T | |||
| ) | mrpt::rtti::CLASS_ID_impl<T>() |
◆ DEFINE_MRPT_OBJECT
| #define DEFINE_MRPT_OBJECT | ( | class_name | ) |
This declaration must be inserted in all CObject classes definition, within the class declaration.
- Examples
- rtti_example1/test.cpp.
◆ DEFINE_VIRTUAL_MRPT_OBJECT
| #define DEFINE_VIRTUAL_MRPT_OBJECT | ( | class_name | ) |
Value:
/*! @name RTTI stuff */ \
/*! @{ */ \
protected: \
static const mrpt::rtti::TRuntimeClassId* _GetBaseClass(); \
static const mrpt::rtti::TRuntimeClassId runtimeClassId; \
\
public: \
using Ptr = std::shared_ptr<class_name>; \
using ConstPtr = std::shared_ptr<const class_name>; \
virtual const mrpt::rtti::TRuntimeClassId* GetRuntimeClass() \
const override; \
static const mrpt::rtti::TRuntimeClassId& GetRuntimeClassIdStatic(); \
/*! @} */
A structure that holds runtime class type information.
Definition: CObject.h:31
This declaration must be inserted in virtual CObject classes definition:
- Examples
- rtti_example1/test.cpp.
◆ IMPLEMENTS_MRPT_OBJECT
| #define IMPLEMENTS_MRPT_OBJECT | ( | class_name, | |
| base, | |||
| NameSpace | |||
| ) |
Value:
mrpt::rtti::CObject* NameSpace::class_name::CreateObject() \
{ \
} \
const mrpt::rtti::TRuntimeClassId* NameSpace::class_name::_GetBaseClass() \
{ \
return CLASS_ID(base); \
} \
const mrpt::rtti::TRuntimeClassId& \
NameSpace::class_name::GetRuntimeClassIdStatic() \
{ \
return NameSpace::class_name::runtimeClassId; \
} \
const mrpt::rtti::TRuntimeClassId NameSpace::class_name::runtimeClassId = \
{#class_name, NameSpace::class_name::CreateObject, \
&class_name::_GetBaseClass}; \
const mrpt::rtti::TRuntimeClassId* \
NameSpace::class_name::GetRuntimeClass() const \
{ \
return CLASS_ID_NAMESPACE(class_name, NameSpace); \
} \
mrpt::rtti::CLASSINIT NameSpace::class_name::_init_##class_name( \
CLASS_ID(base)); \
mrpt::rtti::CObject* NameSpace::class_name::clone() const \
{ \
new NameSpace::class_name(*this)); \
}
The virtual base class of all MRPT classes with a unified RTTI system.
Definition: CObject.h:142
This must be inserted in all CObject classes implementation files.
◆ IMPLEMENTS_VIRTUAL_MRPT_OBJECT
| #define IMPLEMENTS_VIRTUAL_MRPT_OBJECT | ( | class_name, | |
| base_class_name, | |||
| NameSpace | |||
| ) |
Value:
const mrpt::rtti::TRuntimeClassId* NameSpace::class_name::_GetBaseClass() \
{ \
return CLASS_ID(base_class_name); \
} \
const mrpt::rtti::TRuntimeClassId NameSpace::class_name::runtimeClassId = \
{#class_name, nullptr, &NameSpace::class_name::_GetBaseClass}; \
const mrpt::rtti::TRuntimeClassId* \
NameSpace::class_name::GetRuntimeClass() const \
{ \
return CLASS_ID(class_name); \
} \
const mrpt::rtti::TRuntimeClassId& \
NameSpace::class_name::GetRuntimeClassIdStatic() \
{ \
return NameSpace::class_name::runtimeClassId; \
}
This must be inserted as implementation of some required members for virtual CObject classes:
◆ IS_CLASS
| #define IS_CLASS | ( | ptrObj, | |
| class_name | |||
| ) | mrpt::rtti::IS_CLASS_impl<class_name>::check(ptrObj) |
Evaluates to true if the given pointer to an object (derived from mrpt::rtti::CObject) is of the given class.
- Examples
- rtti_example1/test.cpp.
◆ IS_DERIVED
| #define IS_DERIVED | ( | ptrObj, | |
| class_name | |||
| ) | ((ptrObj)->GetRuntimeClass()->derivedFrom(CLASS_ID(class_name))) |
Evaluates to true if a pointer to an object (derived from mrpt::rtti::CObject) is an instance of the given class OR any of its derived classes.
- Examples
- rtti_example1/test.cpp.