Detailed Description
This "software driver" implements the communication protocol for interfacing a SICK LMS 2XX laser scanners through a standard RS232 serial port (or a USB2SERIAL converter).
The serial port is opened upon the first call to "doProcess" or "initialize", so you must call "loadConfig" before this, or manually call "setSerialPort". Another alternative is to call the base class method C2DRangeFinderAbstract::bindIO, but the "setSerialPort" interface is probably much simpler to use.
For an example of usage see the example in "samples/SICK_laser_serial_test". See also the example configuration file for rawlog-grabber in "share/mrpt/config_files/rawlog-grabber".
- See also
- C2DRangeFinderAbstract
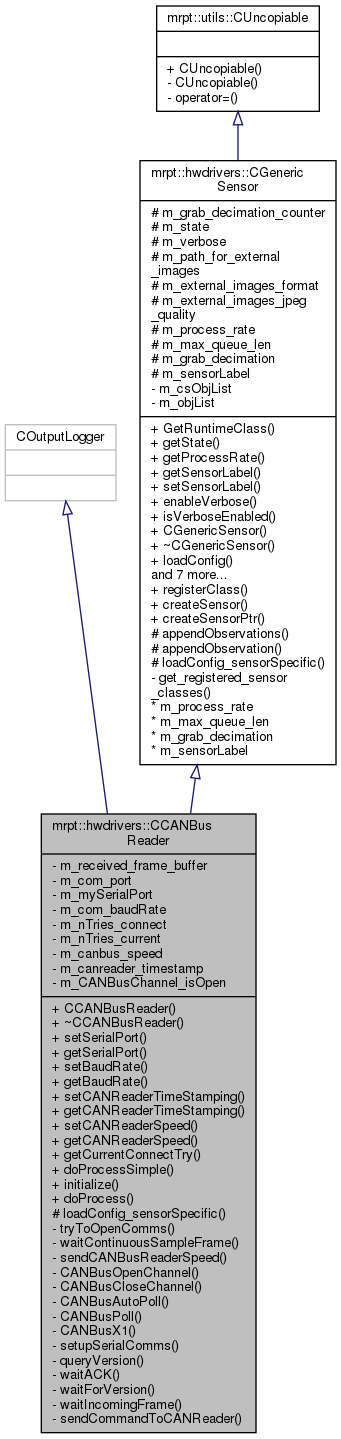
Definition at line 53 of file CCANBusReader.h.
#include <mrpt/hwdrivers/CCANBusReader.h>
Public Types | |
| enum | TSensorState { ssInitializing = 0 , ssWorking , ssError } |
| The current state of the sensor. More... | |
| typedef std::multimap< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObservations |
| typedef std::pair< mrpt::system::TTimeStamp, mrpt::utils::CSerializablePtr > | TListObsPair |
| typedef CGenericSensorPtr | Ptr |
| typedef std::shared_ptr< const CGenericSensor > | ConstPtr |
Public Member Functions | |
| CCANBusReader () | |
| Constructor More... | |
| virtual | ~CCANBusReader () |
| Destructor More... | |
| void | setSerialPort (const std::string &port) |
| Changes the serial port to connect to (call prior to 'doProcess'), for example "COM1" or "ttyS0". More... | |
| std::string | getSerialPort () const |
| void | setBaudRate (int baud) |
| Changes the serial port baud rate (call prior to 'doProcess'); valid values are 9600,38400 and 500000. More... | |
| int | getBaudRate () const |
| void | setCANReaderTimeStamping (bool setTimestamp=false) |
| Enables/Disables the addition of a timestamp according to the arrival time to the converter (default=false) (call prior to 'doProcess') This is not needed if the configuration is loaded with "loadConfig". More... | |
| bool | getCANReaderTimeStamping () |
| void | setCANReaderSpeed (const unsigned int speed) |
| Sets the CAN reader speed when connecting to the CAN Bus. More... | |
| unsigned int | getCANReaderSpeed () |
| unsigned int | getCurrentConnectTry () const |
| If performing several tries in ::initialize(), this is the current try loop number. More... | |
| void | doProcessSimple (bool &outThereIsObservation, mrpt::obs::CObservationCANBusJ1939 &outObservation, bool &hardwareError) |
| Specific laser scanner "software drivers" must process here new data from the I/O stream, and, if a whole scan has arrived, return it. More... | |
| void | initialize () |
| Set-up communication with the laser. More... | |
| void | doProcess () |
| This method will be invoked at a minimum rate of "process_rate" (Hz) More... | |
| virtual const mrpt::hwdrivers::TSensorClassId * | GetRuntimeClass () const =0 |
| TSensorState | getState () const |
| The current state of the sensor More... | |
| double | getProcessRate () const |
| std::string | getSensorLabel () const |
| void | setSensorLabel (const std::string &sensorLabel) |
| void | enableVerbose (bool enabled=true) |
| Enable or disable extra debug info dumped to std::cout during sensor operation. More... | |
| bool | isVerboseEnabled () const |
| void | loadConfig (const mrpt::utils::CConfigFileBase &configSource, const std::string §ion) |
| Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| void | getObservations (TListObservations &lstObjects) |
| Returns a list of enqueued objects, emptying it (thread-safe). More... | |
| virtual void | setPathForExternalImages (const std::string &directory) |
| Set the path where to save off-rawlog image files (will be ignored in those sensors where this is not applicable). More... | |
| void | setExternalImageFormat (const std::string &ext) |
| Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg". More... | |
| void | setExternalImageJPEGQuality (const unsigned int quality) |
| The quality of JPEG compression, when external images is enabled and the format is "jpg". More... | |
| unsigned int | getExternalImageJPEGQuality () const |
Static Public Member Functions | |
| static void | registerClass (const TSensorClassId *pNewClass) |
| Register a class into the internal list of "CGenericSensor" descendents. More... | |
| static CGenericSensor * | createSensor (const std::string &className) |
| Creates a sensor by a name of the class. More... | |
| static CGenericSensorPtr | createSensorPtr (const std::string &className) |
| Just like createSensor, but returning a smart pointer to the newly created sensor object. More... | |
Protected Member Functions | |
| void | loadConfig_sensorSpecific (const mrpt::utils::CConfigFileBase &configSource, const std::string &iniSection) |
| See the class documentation at the top for expected parameters. More... | |
| void | appendObservations (const std::vector< mrpt::utils::CSerializablePtr > &obj) |
| This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations. More... | |
| void | appendObservation (const mrpt::utils::CSerializablePtr &obj) |
| Like appendObservations() but for just one observation. More... | |
Protected Attributes | |
| size_t | m_grab_decimation_counter |
| Used when "m_grab_decimation" is enabled. More... | |
| TSensorState | m_state |
| bool | m_verbose |
| std::string | m_path_for_external_images |
| The path where to save off-rawlog images: empty means save images embedded in the rawlog. More... | |
| std::string | m_external_images_format |
| The extension ("jpg","gif","png",...) that determines the format of images saved externally. More... | |
| unsigned int | m_external_images_jpeg_quality |
| For JPEG images, the quality (default=95%). More... | |
Common settings to any sensor, loaded in "loadConfig" | |
| double | m_process_rate |
| See CGenericSensor. More... | |
| size_t | m_max_queue_len |
| See CGenericSensor. More... | |
| size_t | m_grab_decimation |
| If set to N>=2, only 1 out of N observations will be saved to m_objList. More... | |
| std::string | m_sensorLabel |
| See CGenericSensor. More... | |
Private Types | |
| typedef std::map< std::string, const TSensorClassId * > | registered_sensor_classes_t |
| Used in registerClass. More... | |
Private Member Functions | |
| bool | tryToOpenComms (std::string *err_msg=NULL) |
| Tries to open the com port and setup all the LMS protocol. Returns true if OK or already open. More... | |
| bool | waitContinuousSampleFrame (uint8_t &out_prio, uint8_t &out_pdu_format, uint8_t &out_pdu_spec, uint8_t &out_src_address, uint8_t &out_data_length, uint16_t &out_pgn, std::vector< uint8_t > &out_data, std::vector< char > &out_raw_frame) |
| bool | sendCANBusReaderSpeed () |
| Sends the specified speed to the CAN Converter. More... | |
| bool | CANBusOpenChannel () |
| Opens the CAN Channel. More... | |
| bool | CANBusCloseChannel () |
| Closes the CAN Channel. More... | |
| bool | CANBusAutoPoll () |
| bool | CANBusPoll () |
| bool | CANBusX1 () |
| bool | setupSerialComms () |
| bool | queryVersion (bool printOutVersion=false) |
| bool | waitACK (uint16_t timeout_ms) |
| bool | waitForVersion (uint16_t timeout, bool printOutVersion=false) |
| bool | waitIncomingFrame (uint16_t timeout) |
| bool | sendCommandToCANReader (const uint8_t *cmd, const uint16_t cmd_len, bool wait=true) |
Static Private Member Functions | |
| static registered_sensor_classes_t & | get_registered_sensor_classes () |
| Access to singleton. More... | |
Private Attributes | |
| uint8_t | m_received_frame_buffer [2000] |
| std::string | m_com_port |
| If set to non-empty, the serial port will be attempted to be opened automatically when this class is first used to request data from the laser. More... | |
| CSerialPort * | m_mySerialPort |
| Will be !=NULL only if I created it, so I must destroy it at the end. More... | |
| int | m_com_baudRate |
| Baudrate: 9600, 38400, 500000. More... | |
| unsigned int | m_nTries_connect |
| Default = 1. More... | |
| unsigned int | m_nTries_current |
| int | m_canbus_speed |
| bool | m_canreader_timestamp |
| bool | m_CANBusChannel_isOpen |
| synch::CCriticalSection | m_csObjList |
| The critical section for m_objList. More... | |
| TListObservations | m_objList |
| The queue of objects to be returned by getObservations. More... | |
Member Typedef Documentation
◆ ConstPtr
|
inherited |
Definition at line 124 of file CGenericSensor.h.
◆ Ptr
|
inherited |
Definition at line 123 of file CGenericSensor.h.
◆ registered_sensor_classes_t
|
privateinherited |
Used in registerClass.
Definition at line 130 of file CGenericSensor.h.
◆ TListObservations
|
inherited |
Definition at line 89 of file CGenericSensor.h.
◆ TListObsPair
|
inherited |
Definition at line 90 of file CGenericSensor.h.
Member Enumeration Documentation
◆ TSensorState
|
inherited |
The current state of the sensor.
- See also
- CGenericSensor::getState
| Enumerator | |
|---|---|
| ssInitializing | |
| ssWorking | |
| ssError | |
Definition at line 95 of file CGenericSensor.h.
Constructor & Destructor Documentation
◆ CCANBusReader()
| CCANBusReader::CCANBusReader | ( | ) |
Constructor
Definition at line 46 of file CCANBusReader.cpp.
References m_received_frame_buffer, and mrpt::hwdrivers::CGenericSensor::m_sensorLabel.
◆ ~CCANBusReader()
|
virtual |
Destructor
Definition at line 64 of file CCANBusReader.cpp.
References CANBusCloseChannel(), m_CANBusChannel_isOpen, and m_mySerialPort.
Member Function Documentation
◆ appendObservation()
|
inlineprotectedinherited |
Like appendObservations() but for just one observation.
Definition at line 168 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), and mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow().
◆ appendObservations()
|
protectedinherited |
This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations.
Passed objects must be created in dynamic memory and a smart pointer passed. Example of creation:
If several observations are passed at once in the vector, they'll be considered as a block regarding the grabbing decimation factor.
Definition at line 53 of file CGenericSensor.cpp.
References CLASS_ID, mrpt::hwdrivers::CGenericSensor::m_csObjList, mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_objList, and THROW_EXCEPTION.
Referenced by mrpt::hwdrivers::CKinect::doProcess(), and mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess().
◆ CANBusAutoPoll()
|
private |
Definition at line 324 of file CCANBusReader.cpp.
References sendCommandToCANReader(), and waitACK().
◆ CANBusCloseChannel()
|
private |
Closes the CAN Channel.
Definition at line 313 of file CCANBusReader.cpp.
References m_CANBusChannel_isOpen, and sendCommandToCANReader().
Referenced by setupSerialComms(), and ~CCANBusReader().
◆ CANBusOpenChannel()
|
private |
Opens the CAN Channel.
Definition at line 304 of file CCANBusReader.cpp.
References m_CANBusChannel_isOpen, sendCommandToCANReader(), and waitACK().
Referenced by tryToOpenComms().
◆ CANBusPoll()
|
private |
Definition at line 341 of file CCANBusReader.cpp.
References sendCommandToCANReader(), and waitACK().
◆ CANBusX1()
|
private |
Definition at line 332 of file CCANBusReader.cpp.
References sendCommandToCANReader(), and waitACK().
◆ createSensor()
|
staticinherited |
Creates a sensor by a name of the class.
Typically the user may want to create a smart pointer around the returned pointer, whis is made with:
- Returns
- A pointer to a new class, or NULL if class name is unknown.
Definition at line 103 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
◆ createSensorPtr()
|
inlinestaticinherited |
Just like createSensor, but returning a smart pointer to the newly created sensor object.
Definition at line 201 of file CGenericSensor.h.
◆ doProcess()
|
virtual |
This method will be invoked at a minimum rate of "process_rate" (Hz)
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 82 of file CCANBusReader.cpp.
References mrpt::hwdrivers::CGenericSensor::appendObservation(), mrpt::obs::CObservationCANBusJ1939::Create(), and doProcessSimple().
◆ doProcessSimple()
| void CCANBusReader::doProcessSimple | ( | bool & | outThereIsObservation, |
| mrpt::obs::CObservationCANBusJ1939 & | outObservation, | ||
| bool & | hardwareError | ||
| ) |
Specific laser scanner "software drivers" must process here new data from the I/O stream, and, if a whole scan has arrived, return it.
This method will be typically called in a different thread than other methods, and will be called in a timely fashion.
Definition at line 98 of file CCANBusReader.cpp.
References mrpt::obs::CObservationCANBusJ1939::m_data, mrpt::obs::CObservationCANBusJ1939::m_data_length, mrpt::obs::CObservationCANBusJ1939::m_pdu_format, mrpt::obs::CObservationCANBusJ1939::m_pdu_spec, mrpt::obs::CObservationCANBusJ1939::m_pgn, mrpt::obs::CObservationCANBusJ1939::m_priority, mrpt::obs::CObservationCANBusJ1939::m_raw_frame, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, mrpt::obs::CObservationCANBusJ1939::m_src_address, mrpt::hwdrivers::CGenericSensor::m_state, mrpt::system::now(), mrpt::obs::CObservation::sensorLabel, mrpt::hwdrivers::CGenericSensor::ssWorking, mrpt::obs::CObservation::timestamp, tryToOpenComms(), and waitContinuousSampleFrame().
Referenced by doProcess().
◆ enableVerbose()
|
inlineinherited |
Enable or disable extra debug info dumped to std::cout during sensor operation.
Default: disabled unless the environment variable "MRPT_HWDRIVERS_VERBOSE" is set to "1" during object creation.
Definition at line 113 of file CGenericSensor.h.
◆ get_registered_sensor_classes()
|
staticprivateinherited |
Access to singleton.
Definition at line 111 of file CGenericSensor.cpp.
Referenced by mrpt::hwdrivers::CGenericSensor::createSensor(), and mrpt::hwdrivers::CGenericSensor::registerClass().
◆ getBaudRate()
|
inline |
- See also
- setBaudRate
Definition at line 121 of file CCANBusReader.h.
◆ getCANReaderSpeed()
|
inline |
Definition at line 132 of file CCANBusReader.h.
◆ getCANReaderTimeStamping()
|
inline |
Definition at line 127 of file CCANBusReader.h.
◆ getCurrentConnectTry()
|
inline |
If performing several tries in ::initialize(), this is the current try loop number.
Definition at line 135 of file CCANBusReader.h.
◆ getExternalImageJPEGQuality()
|
inlineinherited |
Definition at line 255 of file CGenericSensor.h.
◆ getObservations()
|
inherited |
Returns a list of enqueued objects, emptying it (thread-safe).
The objects must be freed by the invoker.
Definition at line 90 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::m_csObjList, and mrpt::hwdrivers::CGenericSensor::m_objList.
◆ getProcessRate()
|
inlineinherited |
Definition at line 105 of file CGenericSensor.h.
◆ GetRuntimeClass()
|
pure virtualinherited |
◆ getSensorLabel()
|
inlineinherited |
Definition at line 107 of file CGenericSensor.h.
◆ getSerialPort()
|
inline |
- See also
- setSerialPort
Definition at line 114 of file CCANBusReader.h.
◆ getState()
|
inlineinherited |
The current state of the sensor
Definition at line 103 of file CGenericSensor.h.
◆ initialize()
Set-up communication with the laser.
Called automatically by rawlog-grabber. If used manually, call after "loadConfig" and before "doProcess".
In this class this method does nothing, since the communications are setup at the first try from "doProcess" or "doProcessSimple".
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 459 of file CCANBusReader.cpp.
References m_received_frame_buffer, and tryToOpenComms().
◆ isVerboseEnabled()
|
inlineinherited |
Definition at line 114 of file CGenericSensor.h.
◆ loadConfig()
|
inherited |
Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 131 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_max_queue_len, mrpt::hwdrivers::CGenericSensor::m_process_rate, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, MRPT_END, MRPT_START, mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
Referenced by mrpt::hwdrivers::prepareVideoSourceFromPanel(), and mrpt::hwdrivers::prepareVideoSourceFromUserSelection().
◆ loadConfig_sensorSpecific()
|
protectedvirtual |
See the class documentation at the top for expected parameters.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 159 of file CCANBusReader.cpp.
References m_canbus_speed, m_canreader_timestamp, m_com_baudRate, m_com_port, m_nTries_connect, mrpt::utils::CConfigFileBase::read_bool(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
◆ queryVersion()
|
private |
Definition at line 551 of file CCANBusReader.cpp.
References ASSERT_, m_mySerialPort, sendCommandToCANReader(), and waitForVersion().
Referenced by setupSerialComms().
◆ registerClass()
|
staticinherited |
Register a class into the internal list of "CGenericSensor" descendents.
Used internally in the macros DEFINE_GENERIC_SENSOR, etc...
Can be used as "CGenericSensor::registerClass( SENSOR_CLASS_ID(CMySensor) );" if building custom sensors outside mrpt libraries in user code.
Definition at line 120 of file CGenericSensor.cpp.
References mrpt::hwdrivers::TSensorClassId::className, and mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR::CLASSINIT_GENERIC_SENSOR().
◆ sendCANBusReaderSpeed()
|
private |
Sends the specified speed to the CAN Converter.
Definition at line 281 of file CCANBusReader.cpp.
References m_canbus_speed, RET_ERROR, sendCommandToCANReader(), and waitACK().
Referenced by tryToOpenComms().
◆ sendCommandToCANReader()
|
private |
Definition at line 691 of file CCANBusReader.cpp.
References ASSERT_, m_mySerialPort, mrpt::system::os::memcpy(), MRPT_UNUSED_PARAM, and mrpt::hwdrivers::CSerialPort::Write().
Referenced by CANBusAutoPoll(), CANBusCloseChannel(), CANBusOpenChannel(), CANBusPoll(), CANBusX1(), queryVersion(), and sendCANBusReaderSpeed().
◆ setBaudRate()
|
inline |
Changes the serial port baud rate (call prior to 'doProcess'); valid values are 9600,38400 and 500000.
This is not needed if the configuration is loaded with "loadConfig".
- See also
- getBaudRate
Definition at line 119 of file CCANBusReader.h.
Referenced by setupSerialComms().
◆ setCANReaderSpeed()
|
inline |
Sets the CAN reader speed when connecting to the CAN Bus.
Definition at line 131 of file CCANBusReader.h.
◆ setCANReaderTimeStamping()
|
inline |
Enables/Disables the addition of a timestamp according to the arrival time to the converter (default=false) (call prior to 'doProcess') This is not needed if the configuration is loaded with "loadConfig".
Definition at line 126 of file CCANBusReader.h.
◆ setExternalImageFormat()
|
inlineinherited |
Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg".
Definition at line 247 of file CGenericSensor.h.
◆ setExternalImageJPEGQuality()
|
inlineinherited |
The quality of JPEG compression, when external images is enabled and the format is "jpg".
- See also
- setExternalImageFormat
Definition at line 252 of file CGenericSensor.h.
References quality.
◆ setPathForExternalImages()
|
inlinevirtualinherited |
Set the path where to save off-rawlog image files (will be ignored in those sensors where this is not applicable).
An empty string (the default value at construction) means to save images embedded in the rawlog, instead of on separate files.
- Exceptions
-
std::exception If the directory doesn't exists and cannot be created.
Reimplemented in mrpt::hwdrivers::CSwissRanger3DCamera, mrpt::hwdrivers::COpenNI2Sensor, mrpt::hwdrivers::COpenNI2_RGBD360, mrpt::hwdrivers::CKinect, and mrpt::hwdrivers::CCameraSensor.
Definition at line 238 of file CGenericSensor.h.
References MRPT_UNUSED_PARAM.
◆ setSensorLabel()
|
inlineinherited |
Definition at line 108 of file CGenericSensor.h.
◆ setSerialPort()
|
inline |
Changes the serial port to connect to (call prior to 'doProcess'), for example "COM1" or "ttyS0".
This is not needed if the configuration is loaded with "loadConfig".
Definition at line 111 of file CCANBusReader.h.
◆ setupSerialComms()
|
private |
Definition at line 474 of file CCANBusReader.cpp.
References ASSERT_, CANBusCloseChannel(), m_com_baudRate, m_mySerialPort, m_nTries_connect, m_nTries_current, mrpt::hwdrivers::CSerialPort::purgeBuffers(), queryVersion(), setBaudRate(), mrpt::hwdrivers::CSerialPort::setConfig(), and mrpt::system::sleep().
Referenced by tryToOpenComms().
◆ tryToOpenComms()
|
private |
Tries to open the com port and setup all the LMS protocol. Returns true if OK or already open.
Definition at line 189 of file CCANBusReader.cpp.
References CANBusOpenChannel(), mrpt::hwdrivers::CSerialPort::isOpen(), m_canbus_speed, m_com_port, m_mySerialPort, MRPT_LOG_ERROR_STREAM, mrpt::hwdrivers::CSerialPort::open(), RET_ERROR, sendCANBusReaderSpeed(), mrpt::hwdrivers::CSerialPort::setConfig(), mrpt::hwdrivers::CSerialPort::setSerialPortName(), mrpt::hwdrivers::CSerialPort::setTimeouts(), and setupSerialComms().
Referenced by doProcessSimple(), and initialize().
◆ waitACK()
|
private |
Definition at line 564 of file CCANBusReader.cpp.
References mrpt::format(), m_mySerialPort, mrpt::hwdrivers::CSerialPort::Read(), RET_ERROR, mrpt::utils::CTicTac::Tac(), and mrpt::utils::CTicTac::Tic().
Referenced by CANBusAutoPoll(), CANBusOpenChannel(), CANBusPoll(), CANBusX1(), and sendCANBusReaderSpeed().
◆ waitContinuousSampleFrame()
|
private |
Definition at line 352 of file CCANBusReader.cpp.
References mrpt::format(), hexCharToInt(), m_mySerialPort, MRPT_LOG_ERROR_STREAM, mrpt::hwdrivers::CSerialPort::Read(), and mrpt::system::sleep().
Referenced by doProcessSimple().
◆ waitForVersion()
|
private |
Definition at line 595 of file CCANBusReader.cpp.
References m_mySerialPort, m_received_frame_buffer, mrpt::hwdrivers::CSerialPort::Read(), mrpt::utils::CTicTac::Tac(), and mrpt::utils::CTicTac::Tic().
Referenced by queryVersion().
◆ waitIncomingFrame()
|
private |
Definition at line 644 of file CCANBusReader.cpp.
References hexCharToInt(), m_mySerialPort, m_received_frame_buffer, mrpt::hwdrivers::CSerialPort::Read(), mrpt::utils::CTicTac::Tac(), and mrpt::utils::CTicTac::Tic().
Member Data Documentation
◆ m_canbus_speed
|
private |
Definition at line 91 of file CCANBusReader.h.
Referenced by loadConfig_sensorSpecific(), sendCANBusReaderSpeed(), and tryToOpenComms().
◆ m_CANBusChannel_isOpen
|
private |
Definition at line 93 of file CCANBusReader.h.
Referenced by CANBusCloseChannel(), CANBusOpenChannel(), and ~CCANBusReader().
◆ m_canreader_timestamp
|
private |
Definition at line 92 of file CCANBusReader.h.
Referenced by loadConfig_sensorSpecific().
◆ m_com_baudRate
|
private |
Baudrate: 9600, 38400, 500000.
Definition at line 88 of file CCANBusReader.h.
Referenced by loadConfig_sensorSpecific(), and setupSerialComms().
◆ m_com_port
|
private |
If set to non-empty, the serial port will be attempted to be opened automatically when this class is first used to request data from the laser.
Definition at line 86 of file CCANBusReader.h.
Referenced by loadConfig_sensorSpecific(), and tryToOpenComms().
◆ m_csObjList
|
privateinherited |
The critical section for m_objList.
Definition at line 126 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::getObservations().
◆ m_external_images_format
|
protectedinherited |
The extension ("jpg","gif","png",...) that determines the format of images saved externally.
- See also
- setPathForExternalImages
Definition at line 152 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_external_images_jpeg_quality
|
protectedinherited |
For JPEG images, the quality (default=95%).
Definition at line 153 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific().
◆ m_grab_decimation
|
protectedinherited |
If set to N>=2, only 1 out of N observations will be saved to m_objList.
Definition at line 139 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_decimation_counter
|
protectedinherited |
Used when "m_grab_decimation" is enabled.
Definition at line 144 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_max_queue_len
|
protectedinherited |
See CGenericSensor.
Definition at line 138 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_mySerialPort
|
private |
Will be !=NULL only if I created it, so I must destroy it at the end.
Definition at line 87 of file CCANBusReader.h.
Referenced by queryVersion(), sendCommandToCANReader(), setupSerialComms(), tryToOpenComms(), waitACK(), waitContinuousSampleFrame(), waitForVersion(), waitIncomingFrame(), and ~CCANBusReader().
◆ m_nTries_connect
|
private |
Default = 1.
Definition at line 89 of file CCANBusReader.h.
Referenced by loadConfig_sensorSpecific(), and setupSerialComms().
◆ m_nTries_current
|
private |
Definition at line 90 of file CCANBusReader.h.
Referenced by setupSerialComms().
◆ m_objList
|
privateinherited |
The queue of objects to be returned by getObservations.
Definition at line 127 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), mrpt::hwdrivers::CGenericSensor::getObservations(), and mrpt::hwdrivers::CGenericSensor::~CGenericSensor().
◆ m_path_for_external_images
|
protectedinherited |
The path where to save off-rawlog images: empty means save images embedded in the rawlog.
Definition at line 151 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::setPathForExternalImages().
◆ m_process_rate
|
protectedinherited |
See CGenericSensor.
Definition at line 137 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_received_frame_buffer
|
private |
Definition at line 84 of file CCANBusReader.h.
Referenced by CCANBusReader(), initialize(), waitForVersion(), and waitIncomingFrame().
◆ m_sensorLabel
|
protectedinherited |
See CGenericSensor.
Definition at line 140 of file CGenericSensor.h.
Referenced by CCANBusReader(), mrpt::hwdrivers::CGPSInterface::CGPSInterface(), mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::CHokuyoURG::CHokuyoURG(), mrpt::hwdrivers::CIMUIntersense::CIMUIntersense(), mrpt::hwdrivers::CIMUXSens::CIMUXSens(), mrpt::hwdrivers::CIMUXSens_MT4::CIMUXSens_MT4(), mrpt::hwdrivers::CKinect::CKinect(), mrpt::hwdrivers::CNationalInstrumentsDAQ::CNationalInstrumentsDAQ(), mrpt::hwdrivers::CRoboPeakLidar::CRoboPeakLidar(), mrpt::hwdrivers::CSickLaserSerial::CSickLaserSerial(), mrpt::hwdrivers::CSickLaserUSB::CSickLaserUSB(), mrpt::hwdrivers::CSkeletonTracker::CSkeletonTracker(), mrpt::hwdrivers::CSwissRanger3DCamera::CSwissRanger3DCamera(), mrpt::hwdrivers::CVelodyneScanner::CVelodyneScanner(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreview(), and mrpt::hwdrivers::CSkeletonTracker::processPreviewNone().
◆ m_state
|
protectedinherited |
Definition at line 146 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUIntersense::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CKinect::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), mrpt::hwdrivers::CIMUIntersense::initialize(), mrpt::hwdrivers::CIMUXSens::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CSkeletonTracker::initialize(), mrpt::hwdrivers::CVelodyneScanner::initialize(), mrpt::hwdrivers::CNationalInstrumentsDAQ::readFromDAQ(), and mrpt::hwdrivers::CIMUXSens::searchPortAndConnect().
◆ m_verbose
|
protectedinherited |
Definition at line 147 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::CGenericSensor(), mrpt::hwdrivers::CRoboPeakLidar::checkCOMMs(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CNTRIPEmitter::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CHokuyoURG::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CVelodyneScanner::internal_read_PCAP_packet(), mrpt::hwdrivers::CGPSInterface::JAVAD_sendMessage(), mrpt::hwdrivers::CGPSInterface::legacy_topcon_setup_commands(), mrpt::hwdrivers::CGPSInterface::OnConnectionEstablished(), mrpt::hwdrivers::CGPSInterface::OnConnectionShutdown(), mrpt::hwdrivers::CNationalInstrumentsDAQ::stop(), and mrpt::hwdrivers::CGPSInterface::tryToOpenTheCOM().