Detailed Description
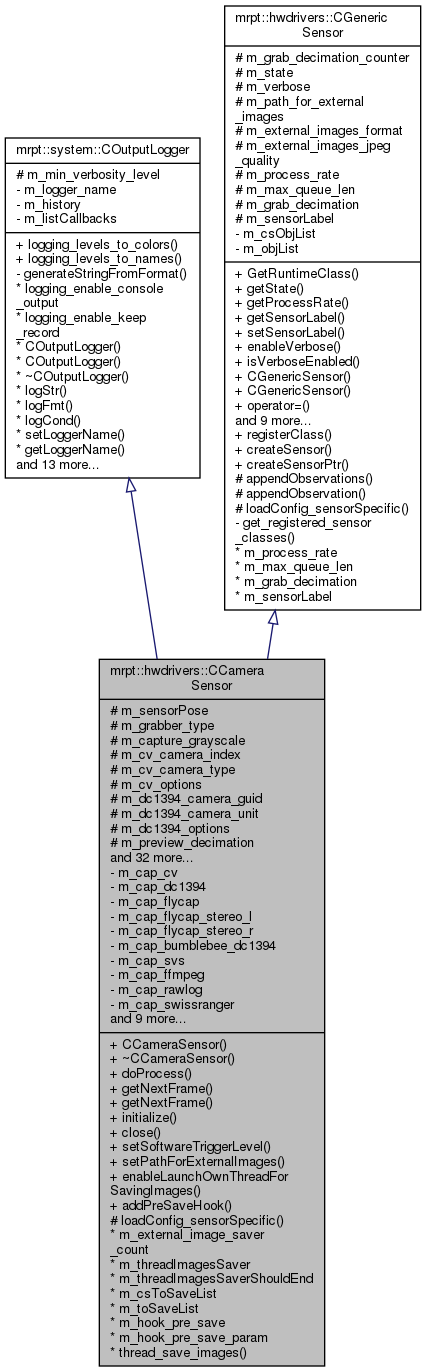
The central class for camera grabbers in MRPT, implementing the "generic sensor" interface.
This class provides the user with a uniform interface to a variety of other classes which manage only one specific camera "driver" (opencv, ffmpeg, PGR FlyCapture,...)
Following the "generic sensor" interface, all the parameters must be passed int the form of a configuration file, which may be also formed on the fly (without being a real config file) as in this example:
Images can be retrieved through the normal "doProcess()" interface, or the specific method "getNextFrame()".
Some notes:
- "grabber_type" determines the class to use internally for image capturing (see below).
- For the meaning of cv_camera_type and other parameters, refer to mrpt::hwdrivers::CImageGrabber_OpenCV
- For the parameters of dc1394 parameters, refer to generic IEEE1394 documentation, and to mrpt::hwdrivers::TCaptureOptions_dc1394.
- If the high number of existing parameters annoy you, try the function prepareVideoSourceFromUserSelection(), which displays a GUI dialog to the user so he/she can choose the desired camera & its parameters.
Images can be saved in the "external storage" mode. Detached threads are created for this task. See setPathForExternalImages() and setExternalImageFormat(). These methods are called automatically from the app rawlog-grabber.
These is the list of all accepted parameters:
- Note
- The execution rate, in rawlog-grabber or the user code calling doProcess(), should be greater than the required capture FPS.
- In Linux you may need to execute "chmod 666 /dev/video1394/ * " and "chmod 666 /dev/raw1394" for allowing any user R/W access to firewire cameras.
-
[New in MRPT 1.4.0] The
bumblebeedriver has been deleted, use theflycapdriver in stereo mode.
- See also
- mrpt::hwdrivers::CImageGrabber_OpenCV, mrpt::hwdrivers::CImageGrabber_dc1394, CGenericSensor, prepareVideoSourceFromUserSelection()
Definition at line 344 of file CCameraSensor.h.
#include <mrpt/hwdrivers/CCameraSensor.h>
Public Types | |
| using | Ptr = std::shared_ptr< CCameraSensor > |
| using | TPreSaveUserHook = std::function< void(const mrpt::obs::CObservation::Ptr &obs, void *user_ptr)> |
| Functor type. More... | |
| enum | TSensorState { ssInitializing = 0 , ssWorking , ssError } |
| The current state of the sensor. More... | |
| using | TListObservations = std::multimap< mrpt::system::TTimeStamp, mrpt::serialization::CSerializable::Ptr > |
| using | TListObsPair = std::pair< mrpt::system::TTimeStamp, mrpt::serialization::CSerializable::Ptr > |
Public Member Functions | |
| CCameraSensor () | |
| Constructor. More... | |
| virtual | ~CCameraSensor () |
| Destructor. More... | |
| void | doProcess () |
| This method will be invoked at a minimum rate of "process_rate" (Hz) More... | |
| mrpt::obs::CObservation::Ptr | getNextFrame () |
| Retrieves the next frame from the video source, raising an exception on any error. More... | |
| void | getNextFrame (std::vector< mrpt::serialization::CSerializable::Ptr > &out_obs) |
| virtual void | initialize () |
| Tries to open the camera, after setting all the parameters with a call to loadConfig. More... | |
| void | close () |
| Close the camera (if open). More... | |
| void | setSoftwareTriggerLevel (bool level) |
| Set Software trigger level value (ON or OFF) for cameras with this function available. More... | |
| virtual void | setPathForExternalImages (const std::string &directory) |
| Set the path where to save off-rawlog image files (this class DOES take into account this path). More... | |
| void | enableLaunchOwnThreadForSavingImages (bool enable=true) |
| This must be called before initialize() More... | |
| void | addPreSaveHook (TPreSaveUserHook user_function, void *user_ptr) |
| Provides a "hook" for user-code to be run BEFORE an image is going to be saved to disk if external storage is enabled (e.g. More... | |
| virtual const mrpt::hwdrivers::TSensorClassId * | GetRuntimeClass () const =0 |
| TSensorState | getState () const |
| The current state of the sensor More... | |
| double | getProcessRate () const |
| std::string | getSensorLabel () const |
| void | setSensorLabel (const std::string &sensorLabel) |
| void | enableVerbose (bool enabled=true) |
| Enable or disable extra debug info dumped to std::cout during sensor operation. More... | |
| bool | isVerboseEnabled () const |
| void | loadConfig (const mrpt::config::CConfigFileBase &configSource, const std::string §ion) |
| Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific". More... | |
| void | getObservations (TListObservations &lstObjects) |
| Returns a list of enqueued objects, emptying it (thread-safe). More... | |
| void | setExternalImageFormat (const std::string &ext) |
| Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg". More... | |
| void | setExternalImageJPEGQuality (const unsigned int quality) |
| The quality of JPEG compression, when external images is enabled and the format is "jpg". More... | |
| unsigned int | getExternalImageJPEGQuality () const |
Static Public Member Functions | |
| static std::array< mrpt::system::TConsoleColor, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_colors () |
| Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor. More... | |
| static std::array< std::string, NUMBER_OF_VERBOSITY_LEVELS > & | logging_levels_to_names () |
| Map from VerbosityLevels to their corresponding names. More... | |
| static void | registerClass (const TSensorClassId *pNewClass) |
| Register a class into the internal list of "CGenericSensor" descendents. More... | |
| static CGenericSensor * | createSensor (const std::string &className) |
| Creates a sensor by a name of the class. More... | |
| static CGenericSensor::Ptr | createSensorPtr (const std::string &className) |
| Just like createSensor, but returning a smart pointer to the newly created sensor object. More... | |
Protected Member Functions | |
| void | loadConfig_sensorSpecific (const mrpt::config::CConfigFileBase &configSource, const std::string &iniSection) |
| See the class documentation at the top for expected parameters. More... | |
| void | appendObservations (const std::vector< mrpt::serialization::CSerializable::Ptr > &obj) |
| This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations. More... | |
| void | appendObservation (const mrpt::serialization::CSerializable::Ptr &obj) |
| Like appendObservations() but for just one observation. More... | |
Private Types | |
| using | registered_sensor_classes_t = std::map< std::string, const TSensorClassId * > |
| Used in registerClass. More... | |
Private Member Functions | |
| std::string | generateStringFromFormat (const char *fmt, va_list argp) const |
| Helper method for generating a std::string instance from printf-like arguments. More... | |
Static Private Member Functions | |
| static registered_sensor_classes_t & | get_registered_sensor_classes () |
| Access to singleton. More... | |
Private Attributes | |
| std::unique_ptr< CImageGrabber_OpenCV > | m_cap_cv |
| The OpenCV capture object. More... | |
| std::unique_ptr< CImageGrabber_dc1394 > | m_cap_dc1394 |
| The dc1394 capture object. More... | |
| std::unique_ptr< CImageGrabber_FlyCapture2 > | m_cap_flycap |
| The FlyCapture2 object. More... | |
| std::unique_ptr< CImageGrabber_FlyCapture2 > | m_cap_flycap_stereo_l |
| The FlyCapture2 object for stereo pairs. More... | |
| std::unique_ptr< CImageGrabber_FlyCapture2 > | m_cap_flycap_stereo_r |
| std::unique_ptr< CStereoGrabber_Bumblebee_libdc1394 > | m_cap_bumblebee_dc1394 |
| std::unique_ptr< CStereoGrabber_SVS > | m_cap_svs |
| The svs capture object. More... | |
| std::unique_ptr< CFFMPEG_InputStream > | m_cap_ffmpeg |
| The FFMPEG capture object. More... | |
| std::unique_ptr< mrpt::io::CFileGZInputStream > | m_cap_rawlog |
| The input file for rawlogs. More... | |
| std::unique_ptr< CSwissRanger3DCamera > | m_cap_swissranger |
| SR 3D camera object. More... | |
| std::unique_ptr< CKinect > | m_cap_kinect |
| Kinect camera object. More... | |
| std::unique_ptr< COpenNI2Sensor > | m_cap_openni2 |
| OpenNI2 object. More... | |
| std::unique_ptr< std::string > | m_cap_image_dir |
| Read images from directory. More... | |
| std::unique_ptr< CDUO3DCamera > | m_cap_duo3d |
| The DUO3D capture object. More... | |
| int | m_camera_grab_decimator |
| int | m_camera_grab_decimator_counter |
| int | m_preview_counter |
| mrpt::gui::CDisplayWindow::Ptr | m_preview_win1 |
| Normally we'll use only one window, but for stereo images we'll use two of them. More... | |
| mrpt::gui::CDisplayWindow::Ptr | m_preview_win2 |
| std::string | m_logger_name |
| std::deque< TMsg > | m_history |
| std::deque< output_logger_callback_t > | m_listCallbacks |
| std::mutex | m_csObjList |
| The critical section for m_objList. More... | |
| TListObservations | m_objList |
| The queue of objects to be returned by getObservations. More... | |
Stuff related to working threads to save images to disk | |
| unsigned int | m_external_image_saver_count |
| Number of working threads. More... | |
| std::vector< std::thread > | m_threadImagesSaver |
| bool | m_threadImagesSaverShouldEnd |
| std::mutex | m_csToSaveList |
| The critical section for m_toSaveList. More... | |
| std::vector< TListObservations > | m_toSaveList |
| The queues of objects to be returned by getObservations, one for each working thread. More... | |
| TPreSaveUserHook | m_hook_pre_save |
| void * | m_hook_pre_save_param |
| void | thread_save_images (unsigned int my_working_thread_index) |
| Thread to save images to files. More... | |
Logging methods | |
| void | logStr (const VerbosityLevel level, const std::string &msg_str) const |
| Main method to add the specified message string to the logger. More... | |
| void | logFmt (const VerbosityLevel level, const char *fmt,...) const MRPT_printf_format_check(3 |
| Alternative logging method, which mimics the printf behavior. More... | |
| void void | logCond (const VerbosityLevel level, bool cond, const std::string &msg_str) const |
| Log the given message only if the condition is satisfied. More... | |
| void | setLoggerName (const std::string &name) |
| Set the name of the COutputLogger instance. More... | |
| std::string | getLoggerName () const |
| Return the name of the COutputLogger instance. More... | |
| void | setMinLoggingLevel (const VerbosityLevel level) |
| Set the minimum logging level for which the incoming logs are going to be taken into account. More... | |
| void | setVerbosityLevel (const VerbosityLevel level) |
| alias of setMinLoggingLevel() More... | |
| VerbosityLevel | getMinLoggingLevel () const |
| bool | isLoggingLevelVisible (VerbosityLevel level) const |
| void | getLogAsString (std::string &log_contents) const |
| Fill the provided string with the contents of the logger's history in std::string representation. More... | |
| std::string | getLogAsString () const |
| Get the history of COutputLogger instance in a string representation. More... | |
| void | writeLogToFile (const std::string *fname_in=NULL) const |
| Write the contents of the COutputLogger instance to an external file. More... | |
| void | dumpLogToConsole () const |
| Dump the current contents of the COutputLogger instance in the terminal window. More... | |
| std::string | getLoggerLastMsg () const |
| Return the last Tmsg instance registered in the logger history. More... | |
| void | getLoggerLastMsg (std::string &msg_str) const |
| Fill inputtted string with the contents of the last message in history. More... | |
| void | loggerReset () |
| Reset the contents of the logger instance. More... | |
| void | logRegisterCallback (output_logger_callback_t userFunc) |
| bool | logDeregisterCallback (output_logger_callback_t userFunc) |
| bool | logging_enable_console_output |
| [Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically. More... | |
| bool | logging_enable_keep_record |
| [Default=false] Enables storing all messages into an internal list. More... | |
Member Typedef Documentation
◆ Ptr
| using mrpt::hwdrivers::CCameraSensor::Ptr = std::shared_ptr<CCameraSensor> |
Definition at line 349 of file CCameraSensor.h.
◆ registered_sensor_classes_t
|
privateinherited |
Used in registerClass.
Definition at line 123 of file CGenericSensor.h.
◆ TListObservations
|
inherited |
Definition at line 76 of file CGenericSensor.h.
◆ TListObsPair
|
inherited |
Definition at line 78 of file CGenericSensor.h.
◆ TPreSaveUserHook
| using mrpt::hwdrivers::CCameraSensor::TPreSaveUserHook = std::function<void( const mrpt::obs::CObservation::Ptr& obs, void* user_ptr)> |
Functor type.
Definition at line 404 of file CCameraSensor.h.
Member Enumeration Documentation
◆ TSensorState
|
inherited |
The current state of the sensor.
- See also
- CGenericSensor::getState
| Enumerator | |
|---|---|
| ssInitializing | |
| ssWorking | |
| ssError | |
Definition at line 84 of file CGenericSensor.h.
Constructor & Destructor Documentation
◆ CCameraSensor()
| CCameraSensor::CCameraSensor | ( | ) |
Constructor.
The camera is not open until "initialize" is called.
Definition at line 43 of file CCameraSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::ssInitializing.
◆ ~CCameraSensor()
|
virtual |
Destructor.
Definition at line 721 of file CCameraSensor.cpp.
Member Function Documentation
◆ addPreSaveHook()
|
inline |
Provides a "hook" for user-code to be run BEFORE an image is going to be saved to disk if external storage is enabled (e.g.
to rectify images, preprocess them, etc.) Notice that this code may be called from detached threads, so it must be thread safe. If used, call this before initialize()
Definition at line 413 of file CCameraSensor.h.
References m_hook_pre_save, and m_hook_pre_save_param.
◆ appendObservation()
|
inlineprotectedinherited |
Like appendObservations() but for just one observation.
Definition at line 179 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::appendObservations().
Referenced by mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CCANBusReader::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), and mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow().
◆ appendObservations()
|
protectedinherited |
This method must be called by derived classes to enqueue a new observation in the list to be returned by getObservations.
Passed objects must be created in dynamic memory and a smart pointer passed. Example of creation:
If several observations are passed at once in the vector, they'll be considered as a block regarding the grabbing decimation factor.
Definition at line 53 of file CGenericSensor.cpp.
References CLASS_ID, mrpt::hwdrivers::CGenericSensor::m_csObjList, mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_objList, and THROW_EXCEPTION.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservation(), mrpt::hwdrivers::CKinect::doProcess(), and mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess().
◆ close()
| void CCameraSensor::close | ( | ) |
Close the camera (if open).
This method is called automatically on destruction.
Definition at line 399 of file CCameraSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::ssInitializing.
◆ createSensor()
|
staticinherited |
Creates a sensor by a name of the class.
Typically the user may want to create a smart pointer around the returned pointer, whis is made with:
- Returns
- A pointer to a new class, or nullptr if class name is unknown.
Definition at line 103 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::createSensorPtr().
◆ createSensorPtr()
|
inlinestaticinherited |
Just like createSensor, but returning a smart pointer to the newly created sensor object.
Definition at line 219 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::createSensor().
◆ doProcess()
|
virtual |
This method will be invoked at a minimum rate of "process_rate" (Hz)
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 1385 of file CCameraSensor.cpp.
◆ dumpLogToConsole()
|
inherited |
Dump the current contents of the COutputLogger instance in the terminal window.
- See also
- writeToFile
Definition at line 190 of file COutputLogger.cpp.
◆ enableLaunchOwnThreadForSavingImages()
|
inline |
This must be called before initialize()
Definition at line 398 of file CCameraSensor.h.
References m_external_images_own_thread.
◆ enableVerbose()
|
inlineinherited |
Enable or disable extra debug info dumped to std::cout during sensor operation.
Default: disabled unless the environment variable "MRPT_HWDRIVERS_VERBOSE" is set to "1" during object creation.
Definition at line 105 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_verbose.
◆ generateStringFromFormat()
|
privateinherited |
Helper method for generating a std::string instance from printf-like arguments.
Definition at line 110 of file COutputLogger.cpp.
References mrpt::system::os::vsnprintf().
◆ get_registered_sensor_classes()
|
staticprivateinherited |
Access to singleton.
Definition at line 112 of file CGenericSensor.cpp.
Referenced by mrpt::hwdrivers::CGenericSensor::createSensor(), and mrpt::hwdrivers::CGenericSensor::registerClass().
◆ getExternalImageJPEGQuality()
|
inlineinherited |
Definition at line 289 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_external_images_jpeg_quality.
◆ getLogAsString() [1/2]
|
inherited |
Get the history of COutputLogger instance in a string representation.
Definition at line 159 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::getDescriptiveReport().
◆ getLogAsString() [2/2]
|
inherited |
Fill the provided string with the contents of the logger's history in std::string representation.
Definition at line 154 of file COutputLogger.cpp.
◆ getLoggerLastMsg() [1/2]
|
inherited |
Return the last Tmsg instance registered in the logger history.
Definition at line 195 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::getAsString().
◆ getLoggerLastMsg() [2/2]
|
inherited |
Fill inputtted string with the contents of the last message in history.
Definition at line 201 of file COutputLogger.cpp.
◆ getLoggerName()
|
inherited |
Return the name of the COutputLogger instance.
- See also
- setLoggerName
Definition at line 143 of file COutputLogger.cpp.
◆ getMinLoggingLevel()
|
inlineinherited |
- See also
- setMinLoggingLevel
Definition at line 200 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::maps::CRandomFieldGridMap2D::isEnabledVerbose(), and mrpt::slam::CMetricMapBuilderRBPF::processActionObservation().
◆ getNextFrame() [1/2]
| CObservation::Ptr CCameraSensor::getNextFrame | ( | ) |
Retrieves the next frame from the video source, raising an exception on any error.
Note: The returned observations can be of one of these classes (you can use IS_CLASS(obs,CObservationXXX) to determine it):
- mrpt::obs::CObservationImage (For normal cameras or video sources)
- mrpt::obs::CObservationStereoImages (For stereo cameras)
- mrpt::obs::CObservation3DRangeScan (For 3D cameras)
Definition at line 731 of file CCameraSensor.cpp.
◆ getNextFrame() [2/2]
| void CCameraSensor::getNextFrame | ( | std::vector< mrpt::serialization::CSerializable::Ptr > & | out_obs | ) |
Definition at line 741 of file CCameraSensor.cpp.
References mrpt::serialization::archiveFrom(), ASSERT_, mrpt::system::fileNameStripInvalidChars(), mrpt::format(), mrpt::obs::CObservationImage::image, mrpt::img::IMG_INTERP_NN, INVALID_TIMESTAMP, IS_CLASS, IS_DERIVED, mrpt::system::now(), mrpt::img::CImage::scaleImage(), mrpt::hwdrivers::CGenericSensor::ssError, THROW_EXCEPTION, mrpt::system::timeDifference(), mrpt::obs::CObservation::timestamp, mrpt::system::timestampTotime_t(), and trim().
◆ getObservations()
|
inherited |
Returns a list of enqueued objects, emptying it (thread-safe).
The objects must be freed by the invoker.
Definition at line 91 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::m_csObjList, and mrpt::hwdrivers::CGenericSensor::m_objList.
◆ getProcessRate()
|
inlineinherited |
Definition at line 93 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_process_rate.
◆ GetRuntimeClass()
|
pure virtualinherited |
◆ getSensorLabel()
|
inlineinherited |
Definition at line 94 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_sensorLabel.
◆ getState()
|
inlineinherited |
The current state of the sensor
Definition at line 92 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_state.
◆ initialize()
Tries to open the camera, after setting all the parameters with a call to loadConfig.
- Exceptions
-
This method must throw an exception with a descriptive message if some critical error is found.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 103 of file CCameraSensor.cpp.
References mrpt::format(), mrpt::system::lowerCase(), mrpt::typemeta::TEnumType< ENUMTYPE >::name2value(), mrpt::hwdrivers::CGenericSensor::ssError, mrpt::hwdrivers::CGenericSensor::ssWorking, mrpt::hwdrivers::CImageGrabber_FlyCapture2::startSyncCapture(), thread_save_images(), THROW_EXCEPTION, THROW_EXCEPTION_FMT, trim(), mrpt::system::upperCase(), mrpt::hwdrivers::CKinect::VIDEO_CHANNEL_IR, and mrpt::hwdrivers::CKinect::VIDEO_CHANNEL_RGB.
◆ isLoggingLevelVisible()
|
inlineinherited |
Definition at line 201 of file system/COutputLogger.h.
References mrpt::system::COutputLogger::m_min_verbosity_level.
Referenced by mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ isVerboseEnabled()
|
inlineinherited |
Definition at line 106 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_verbose.
◆ loadConfig()
|
inherited |
Loads the generic settings common to any sensor (See CGenericSensor), then call to "loadConfig_sensorSpecific".
- Exceptions
-
This method throws an exception with a descriptive message if some critical parameter is missing or has an invalid value.
Definition at line 132 of file CGenericSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::loadConfig_sensorSpecific(), mrpt::hwdrivers::CGenericSensor::m_grab_decimation, mrpt::hwdrivers::CGenericSensor::m_grab_decimation_counter, mrpt::hwdrivers::CGenericSensor::m_max_queue_len, mrpt::hwdrivers::CGenericSensor::m_process_rate, mrpt::hwdrivers::CGenericSensor::m_sensorLabel, MRPT_END, MRPT_START, mrpt::config::CConfigFileBase::read_double(), mrpt::config::CConfigFileBase::read_int(), and mrpt::config::CConfigFileBase::read_string().
◆ loadConfig_sensorSpecific()
|
protectedvirtual |
See the class documentation at the top for expected parameters.
Implements mrpt::hwdrivers::CGenericSensor.
Definition at line 429 of file CCameraSensor.cpp.
References ADD_COLOR_MAP, mrpt::hwdrivers::COLOR_CODING_MONO16, mrpt::hwdrivers::COLOR_CODING_MONO8, mrpt::hwdrivers::COLOR_CODING_RGB8, mrpt::hwdrivers::COLOR_CODING_YUV411, mrpt::hwdrivers::COLOR_CODING_YUV422, mrpt::hwdrivers::COLOR_CODING_YUV444, mrpt::DEG2RAD(), mrpt::hwdrivers::FRAMERATE_120, mrpt::hwdrivers::FRAMERATE_15, mrpt::hwdrivers::FRAMERATE_1_875, mrpt::hwdrivers::FRAMERATE_240, mrpt::hwdrivers::FRAMERATE_30, mrpt::hwdrivers::FRAMERATE_3_75, mrpt::hwdrivers::FRAMERATE_60, mrpt::hwdrivers::FRAMERATE_7_5, MRPT_LOAD_HERE_CONFIG_VAR, mrpt::config::CConfigFileBase::read_bool(), mrpt::config::CConfigFileBase::read_double(), mrpt::config::CConfigFileBase::read_float(), mrpt::config::CConfigFileBase::read_int(), mrpt::config::CConfigFileBase::read_string(), mrpt::config::CConfigFileBase::read_string_first_word(), THROW_EXCEPTION_FMT, mrpt::system::trim(), and mrpt::system::upperCase().
◆ logCond()
|
inherited |
Log the given message only if the condition is satisfied.
- See also
- log, logFmt
Definition at line 131 of file COutputLogger.cpp.
◆ logDeregisterCallback()
|
inherited |
- Returns
- true if an entry was found and deleted.
Definition at line 290 of file COutputLogger.cpp.
References getAddress(), and mrpt::system::COutputLogger::m_listCallbacks.
◆ logFmt()
|
inherited |
Alternative logging method, which mimics the printf behavior.
Handy for not having to first use mrpt::format to pass a std::string message to logStr
Definition at line 91 of file COutputLogger.cpp.
Referenced by mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::CICPCriteriaNRD(), mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), CGraphSlamHandler< GRAPH_T >::execute(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), CGraphSlamHandler< GRAPH_T >::initOutputDir(), CGraphSlamHandler< GRAPH_T >::initVisualization(), mrpt::nav::CNavigatorManualSequence::navigationStep(), mrpt::nav::CAbstractNavigator::performNavigationStepNavigating(), CGraphSlamHandler< GRAPH_T >::readConfigFname(), CGraphSlamHandler< GRAPH_T >::saveResults(), CGraphSlamHandler< GRAPH_T >::setResultsDirName(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and CGraphSlamHandler< GRAPH_T >::~CGraphSlamHandler().
◆ loggerReset()
|
inherited |
Reset the contents of the logger instance.
Called upon construction.
Definition at line 206 of file COutputLogger.cpp.
References mrpt::system::LVL_INFO.
◆ logging_levels_to_colors()
|
staticinherited |
Map from VerbosityLevels to their corresponding mrpt::system::TConsoleColor.
Handy for coloring the input based on the verbosity of the message
Definition at line 47 of file COutputLogger.cpp.
References logging_levels_to_colors.
Referenced by mrpt::system::COutputLogger::TMsg::dumpToConsole().
◆ logging_levels_to_names()
|
staticinherited |
Map from VerbosityLevels to their corresponding names.
Handy for printing the current message VerbosityLevel along with the actual content
Definition at line 60 of file COutputLogger.cpp.
References logging_levels_to_names.
Referenced by mrpt::system::COutputLogger::TMsg::getAsString().
◆ logRegisterCallback()
|
inherited |
Definition at line 277 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::m_listCallbacks.
◆ logStr()
|
inherited |
Main method to add the specified message string to the logger.
Definition at line 72 of file COutputLogger.cpp.
References mrpt::system::COutputLogger::TMsg::body, mrpt::system::COutputLogger::TMsg::dumpToConsole(), mrpt::system::COutputLogger::TMsg::level, mrpt::system::COutputLogger::TMsg::name, and mrpt::system::COutputLogger::TMsg::timestamp.
Referenced by mrpt::slam::PF_implementation< PARTICLE_TYPE, MYSELF, STORAGE >::PF_SLAM_implementation_pfAuxiliaryPFStandardAndOptimal(), mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::system::COutputLoggerStreamWrapper::~COutputLoggerStreamWrapper().
◆ registerClass()
|
staticinherited |
Register a class into the internal list of "CGenericSensor" descendents.
Used internally in the macros DEFINE_GENERIC_SENSOR, etc...
Can be used as "CGenericSensor::registerClass( SENSOR_CLASS_ID(CMySensor) );" if building custom sensors outside mrpt libraries in user code.
Definition at line 121 of file CGenericSensor.cpp.
References mrpt::hwdrivers::TSensorClassId::className, and mrpt::hwdrivers::CGenericSensor::get_registered_sensor_classes().
Referenced by mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR::CLASSINIT_GENERIC_SENSOR().
◆ setExternalImageFormat()
|
inlineinherited |
Set the extension ("jpg","gif","png",...) that determines the format of images saved externally The default is "jpg".
Definition at line 278 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_external_images_format.
◆ setExternalImageJPEGQuality()
|
inlineinherited |
The quality of JPEG compression, when external images is enabled and the format is "jpg".
- See also
- setExternalImageFormat
Definition at line 285 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_external_images_jpeg_quality.
◆ setLoggerName()
|
inherited |
Set the name of the COutputLogger instance.
- See also
- getLoggerName
Definition at line 138 of file COutputLogger.cpp.
Referenced by mrpt::slam::CMetricMapBuilderICP::CMetricMapBuilderICP(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::slam::CMonteCarloLocalization2D::CMonteCarloLocalization2D(), mrpt::slam::CMonteCarloLocalization3D::CMonteCarloLocalization3D(), and mrpt::graphslam::CWindowManager::initCWindowManager().
◆ setMinLoggingLevel()
|
inherited |
Set the minimum logging level for which the incoming logs are going to be taken into account.
String messages with specified VerbosityLevel smaller than the min, will not be outputted to the screen and neither will a record of them be stored in by the COutputLogger instance
Definition at line 144 of file COutputLogger.cpp.
Referenced by mrpt::maps::CRandomFieldGridMap2D::enableVerbose(), mrpt::math::CLevenbergMarquardtTempl< VECTORTYPE, USERPARAM >::execute(), mrpt::hwdrivers::CHokuyoURG::initialize(), and mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::loadParams().
◆ setPathForExternalImages()
|
virtual |
Set the path where to save off-rawlog image files (this class DOES take into account this path).
An empty string (the default value at construction) means to save images embedded in the rawlog, instead of on separate files.
- Exceptions
-
std::exception If the directory doesn't exists and cannot be created.
Reimplemented from mrpt::hwdrivers::CGenericSensor.
Definition at line 1415 of file CCameraSensor.cpp.
References mrpt::system::createDirectory(), and THROW_EXCEPTION_FMT.
◆ setSensorLabel()
|
inlineinherited |
Definition at line 95 of file CGenericSensor.h.
References mrpt::hwdrivers::CGenericSensor::m_sensorLabel.
◆ setSoftwareTriggerLevel()
| void CCameraSensor::setSoftwareTriggerLevel | ( | bool | level | ) |
Set Software trigger level value (ON or OFF) for cameras with this function available.
Definition at line 1395 of file CCameraSensor.cpp.
References mrpt::hwdrivers::CGenericSensor::ssError, and THROW_EXCEPTION.
◆ setVerbosityLevel()
|
inherited |
alias of setMinLoggingLevel()
Definition at line 149 of file COutputLogger.cpp.
Referenced by mrpt::nav::CAbstractNavigator::CAbstractNavigator(), mrpt::slam::CMetricMapBuilderRBPF::CMetricMapBuilderRBPF(), mrpt::comms::CServerTCPSocket::CServerTCPSocket(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), and mrpt::math::ransac_detect_2D_lines().
◆ thread_save_images()
|
private |
Thread to save images to files.
Definition at line 1579 of file CCameraSensor.cpp.
References mrpt::system::fileNameStripInvalidChars(), mrpt::format(), IS_CLASS, IS_DERIVED, mrpt::system::timestampTotime_t(), and trim().
Referenced by initialize().
◆ writeLogToFile()
|
inherited |
Write the contents of the COutputLogger instance to an external file.
Upon call to this method, COutputLogger dumps the contents of all the logged commands so far to the specified external file. By default the filename is set to ${LOGGERNAME}.log except if the fname parameter is provided
- See also
- dumpToConsole, getAsString
Definition at line 165 of file COutputLogger.cpp.
References ASSERTMSG_, and mrpt::format().
Member Data Documentation
◆ logging_enable_console_output
|
inherited |
[Default=true] Set it to false in case you don't want the logged messages to be dumped to the output automatically.
Definition at line 239 of file system/COutputLogger.h.
◆ logging_enable_keep_record
|
inherited |
[Default=false] Enables storing all messages into an internal list.
- See also
- writeLogToFile, getLogAsString
Definition at line 242 of file system/COutputLogger.h.
◆ m_bumblebee_dc1394_camera_guid
|
protected |
Definition at line 441 of file CCameraSensor.h.
◆ m_bumblebee_dc1394_camera_unit
|
protected |
Definition at line 442 of file CCameraSensor.h.
◆ m_bumblebee_dc1394_framerate
|
protected |
Definition at line 443 of file CCameraSensor.h.
◆ m_camera_grab_decimator
|
private |
Definition at line 544 of file CCameraSensor.h.
◆ m_camera_grab_decimator_counter
|
private |
Definition at line 545 of file CCameraSensor.h.
◆ m_cap_bumblebee_dc1394
|
private |
Definition at line 525 of file CCameraSensor.h.
◆ m_cap_cv
|
private |
The OpenCV capture object.
Definition at line 517 of file CCameraSensor.h.
◆ m_cap_dc1394
|
private |
The dc1394 capture object.
Definition at line 519 of file CCameraSensor.h.
◆ m_cap_duo3d
|
private |
The DUO3D capture object.
Definition at line 541 of file CCameraSensor.h.
◆ m_cap_ffmpeg
|
private |
The FFMPEG capture object.
Definition at line 529 of file CCameraSensor.h.
◆ m_cap_flycap
|
private |
The FlyCapture2 object.
Definition at line 521 of file CCameraSensor.h.
◆ m_cap_flycap_stereo_l
|
private |
The FlyCapture2 object for stereo pairs.
Definition at line 523 of file CCameraSensor.h.
◆ m_cap_flycap_stereo_r
|
private |
Definition at line 524 of file CCameraSensor.h.
◆ m_cap_image_dir
|
private |
Read images from directory.
Definition at line 539 of file CCameraSensor.h.
◆ m_cap_kinect
|
private |
Kinect camera object.
Definition at line 535 of file CCameraSensor.h.
◆ m_cap_openni2
|
private |
OpenNI2 object.
Definition at line 537 of file CCameraSensor.h.
◆ m_cap_rawlog
|
private |
The input file for rawlogs.
Definition at line 531 of file CCameraSensor.h.
◆ m_cap_svs
|
private |
The svs capture object.
Definition at line 527 of file CCameraSensor.h.
◆ m_cap_swissranger
|
private |
SR 3D camera object.
Definition at line 533 of file CCameraSensor.h.
◆ m_capture_grayscale
|
protected |
Definition at line 425 of file CCameraSensor.h.
◆ m_csObjList
|
privateinherited |
The critical section for m_objList.
Definition at line 118 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::getObservations().
◆ m_csToSaveList
|
private |
The critical section for m_toSaveList.
Definition at line 560 of file CCameraSensor.h.
◆ m_cv_camera_index
|
protected |
Definition at line 428 of file CCameraSensor.h.
◆ m_cv_camera_type
|
protected |
Definition at line 429 of file CCameraSensor.h.
◆ m_cv_options
|
protected |
Definition at line 430 of file CCameraSensor.h.
◆ m_dc1394_camera_guid
|
protected |
Definition at line 433 of file CCameraSensor.h.
◆ m_dc1394_camera_unit
|
protected |
Definition at line 434 of file CCameraSensor.h.
◆ m_dc1394_options
|
protected |
Definition at line 435 of file CCameraSensor.h.
◆ m_duo3d_options
|
protected |
Definition at line 503 of file CCameraSensor.h.
◆ m_external_image_saver_count
|
private |
Number of working threads.
Default:1, set to 2 in quad cores.
Definition at line 555 of file CCameraSensor.h.
◆ m_external_images_format
|
protectedinherited |
The extension ("jpg","gif","png",...) that determines the format of images saved externally.
- See also
- setPathForExternalImages
Definition at line 157 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), and mrpt::hwdrivers::CGenericSensor::setExternalImageFormat().
◆ m_external_images_jpeg_quality
|
protectedinherited |
For JPEG images, the quality (default=95%).
Definition at line 159 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::getExternalImageJPEGQuality(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::loadConfig_sensorSpecific(), and mrpt::hwdrivers::CGenericSensor::setExternalImageJPEGQuality().
◆ m_external_images_own_thread
|
protected |
Whether to launch independent thread.
Definition at line 507 of file CCameraSensor.h.
Referenced by enableLaunchOwnThreadForSavingImages().
◆ m_fcs_start_synch_capture
|
protected |
Definition at line 488 of file CCameraSensor.h.
◆ m_ffmpeg_url
|
protected |
Definition at line 450 of file CCameraSensor.h.
◆ m_flycap_options
|
protected |
Definition at line 484 of file CCameraSensor.h.
◆ m_flycap_stereo_options
|
protected |
Definition at line 490 of file CCameraSensor.h.
◆ m_grab_decimation
|
protectedinherited |
If set to N>=2, only 1 out of N observations will be saved to m_objList.
Definition at line 138 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grab_decimation_counter
|
protectedinherited |
Used when "m_grab_decimation" is enabled.
Definition at line 145 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_grabber_type
|
protected |
Can be "opencv",...
Definition at line 424 of file CCameraSensor.h.
◆ m_history
|
mutableprivateinherited |
Definition at line 310 of file system/COutputLogger.h.
◆ m_hook_pre_save
|
private |
Definition at line 567 of file CCameraSensor.h.
Referenced by addPreSaveHook().
◆ m_hook_pre_save_param
|
private |
Definition at line 568 of file CCameraSensor.h.
Referenced by addPreSaveHook().
◆ m_img_dir_counter
|
protected |
Definition at line 500 of file CCameraSensor.h.
◆ m_img_dir_end_index
|
protected |
Definition at line 497 of file CCameraSensor.h.
◆ m_img_dir_is_stereo
|
protected |
Definition at line 499 of file CCameraSensor.h.
◆ m_img_dir_left_format
|
protected |
Definition at line 494 of file CCameraSensor.h.
◆ m_img_dir_right_format
|
protected |
Definition at line 495 of file CCameraSensor.h.
◆ m_img_dir_start_index
|
protected |
Definition at line 496 of file CCameraSensor.h.
◆ m_img_dir_url
|
protected |
Definition at line 493 of file CCameraSensor.h.
◆ m_kinect_save_3d
|
protected |
Save the 3D point cloud (default: true)
Definition at line 474 of file CCameraSensor.h.
◆ m_kinect_save_intensity_img
|
protected |
Save the 2D intensity image (default: true)
Definition at line 478 of file CCameraSensor.h.
◆ m_kinect_save_range_img
|
protected |
Save the 2D range image (default: true)
Definition at line 476 of file CCameraSensor.h.
◆ m_kinect_video_rgb
|
protected |
Save RGB or IR channels (default:true)
Definition at line 480 of file CCameraSensor.h.
◆ m_listCallbacks
|
privateinherited |
Definition at line 312 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::logDeregisterCallback(), and mrpt::system::COutputLogger::logRegisterCallback().
◆ m_logger_name
|
privateinherited |
Definition at line 308 of file system/COutputLogger.h.
◆ m_max_queue_len
|
protectedinherited |
See CGenericSensor.
Definition at line 135 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_min_verbosity_level
|
protectedinherited |
Provided messages with VerbosityLevel smaller than this value shall be ignored.
Definition at line 252 of file system/COutputLogger.h.
Referenced by mrpt::system::COutputLogger::getMinLoggingLevel(), and mrpt::system::COutputLogger::isLoggingLevelVisible().
◆ m_objList
|
privateinherited |
The queue of objects to be returned by getObservations.
Definition at line 120 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::appendObservations(), mrpt::hwdrivers::CGenericSensor::getObservations(), and mrpt::hwdrivers::CGenericSensor::~CGenericSensor().
◆ m_path_for_external_images
|
protectedinherited |
The path where to save off-rawlog images: empty means save images embedded in the rawlog.
Definition at line 154 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), and mrpt::hwdrivers::CSwissRanger3DCamera::setPathForExternalImages().
◆ m_preview_counter
|
private |
Definition at line 547 of file CCameraSensor.h.
◆ m_preview_decimation
|
protected |
Definition at line 436 of file CCameraSensor.h.
◆ m_preview_reduction
|
protected |
Definition at line 437 of file CCameraSensor.h.
◆ m_preview_win1
|
private |
Normally we'll use only one window, but for stereo images we'll use two of them.
Definition at line 550 of file CCameraSensor.h.
◆ m_preview_win2
|
private |
Definition at line 550 of file CCameraSensor.h.
◆ m_process_rate
|
protectedinherited |
See CGenericSensor.
Definition at line 133 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::getProcessRate(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), and mrpt::hwdrivers::CGenericSensor::loadConfig().
◆ m_rawlog_camera_sensor_label
|
protected |
Definition at line 454 of file CCameraSensor.h.
◆ m_rawlog_detected_images_dir
|
protected |
Definition at line 455 of file CCameraSensor.h.
◆ m_rawlog_file
|
protected |
Definition at line 453 of file CCameraSensor.h.
◆ m_sensorLabel
|
protectedinherited |
See CGenericSensor.
Definition at line 140 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CCANBusReader::CCANBusReader(), mrpt::hwdrivers::CGPSInterface::CGPSInterface(), mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::CHokuyoURG::CHokuyoURG(), mrpt::hwdrivers::CIMUXSens::CIMUXSens(), mrpt::hwdrivers::CIMUXSens_MT4::CIMUXSens_MT4(), mrpt::hwdrivers::CKinect::CKinect(), mrpt::hwdrivers::CNationalInstrumentsDAQ::CNationalInstrumentsDAQ(), mrpt::hwdrivers::CRoboPeakLidar::CRoboPeakLidar(), mrpt::hwdrivers::CSickLaserSerial::CSickLaserSerial(), mrpt::hwdrivers::CSickLaserUSB::CSickLaserUSB(), mrpt::hwdrivers::CSkeletonTracker::CSkeletonTracker(), mrpt::hwdrivers::CSwissRanger3DCamera::CSwissRanger3DCamera(), mrpt::hwdrivers::CVelodyneScanner::CVelodyneScanner(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CRoboPeakLidar::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CKinect::getNextObservation(), mrpt::hwdrivers::CSwissRanger3DCamera::getNextObservation(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGenericSensor::getSensorLabel(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CGenericSensor::loadConfig(), mrpt::hwdrivers::C2DRangeFinderAbstract::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreview(), mrpt::hwdrivers::CSkeletonTracker::processPreviewNone(), and mrpt::hwdrivers::CGenericSensor::setSensorLabel().
◆ m_sensorPose
|
protected |
Definition at line 421 of file CCameraSensor.h.
◆ m_sr_ip_address
|
protected |
Definition at line 461 of file CCameraSensor.h.
◆ m_sr_open_from_usb
|
protected |
true: USB, false: ETH
Definition at line 460 of file CCameraSensor.h.
◆ m_sr_save_3d
|
protected |
Save the 3D point cloud (default: true)
Definition at line 463 of file CCameraSensor.h.
◆ m_sr_save_confidence
|
protected |
Save the estimated confidence 2D image (default: false)
Definition at line 469 of file CCameraSensor.h.
◆ m_sr_save_intensity_img
|
protected |
Save the 2D intensity image (default: true)
Definition at line 467 of file CCameraSensor.h.
◆ m_sr_save_range_img
|
protected |
Save the 2D range image (default: true)
Definition at line 465 of file CCameraSensor.h.
◆ m_state
|
protectedinherited |
Definition at line 147 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGyroKVHDSP3000::CGyroKVHDSP3000(), mrpt::hwdrivers::C2DRangeFinderAbstract::doProcess(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CGyroKVHDSP3000::doProcess(), mrpt::hwdrivers::CIMUXSens::doProcess(), mrpt::hwdrivers::CIMUXSens_MT4::doProcess(), mrpt::hwdrivers::CKinect::doProcess(), mrpt::hwdrivers::CNationalInstrumentsDAQ::doProcess(), mrpt::hwdrivers::CSkeletonTracker::doProcess(), mrpt::hwdrivers::CSwissRanger3DCamera::doProcess(), mrpt::hwdrivers::CVelodyneScanner::doProcess(), mrpt::hwdrivers::CHokuyoURG::doProcessSimple(), mrpt::hwdrivers::CSickLaserSerial::doProcessSimple(), mrpt::hwdrivers::CSickLaserUSB::doProcessSimple(), mrpt::hwdrivers::CCANBusReader::doProcessSimple(), mrpt::hwdrivers::CGPSInterface::flushParsedMessagesNow(), mrpt::hwdrivers::CVelodyneScanner::getNextObservation(), mrpt::hwdrivers::CGenericSensor::getState(), mrpt::hwdrivers::CGyroKVHDSP3000::initialize(), mrpt::hwdrivers::CIMUXSens::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CSkeletonTracker::initialize(), mrpt::hwdrivers::CVelodyneScanner::initialize(), mrpt::hwdrivers::CNationalInstrumentsDAQ::readFromDAQ(), and mrpt::hwdrivers::CIMUXSens::searchPortAndConnect().
◆ m_svs_camera_index
|
protected |
Definition at line 446 of file CCameraSensor.h.
◆ m_svs_options
|
protected |
Definition at line 447 of file CCameraSensor.h.
◆ m_threadImagesSaver
|
private |
Definition at line 556 of file CCameraSensor.h.
◆ m_threadImagesSaverShouldEnd
|
private |
Definition at line 558 of file CCameraSensor.h.
◆ m_toSaveList
|
private |
The queues of objects to be returned by getObservations, one for each working thread.
Definition at line 563 of file CCameraSensor.h.
◆ m_verbose
|
protectedinherited |
Definition at line 148 of file CGenericSensor.h.
Referenced by mrpt::hwdrivers::CGenericSensor::CGenericSensor(), mrpt::hwdrivers::CRoboPeakLidar::checkCOMMs(), mrpt::hwdrivers::CGPSInterface::doProcess(), mrpt::hwdrivers::CNTRIPEmitter::doProcess(), mrpt::hwdrivers::CGenericSensor::enableVerbose(), mrpt::hwdrivers::CNationalInstrumentsDAQ::grabbing_thread(), mrpt::hwdrivers::CHokuyoURG::initialize(), mrpt::hwdrivers::CIMUXSens_MT4::initialize(), mrpt::hwdrivers::CVelodyneScanner::internal_read_PCAP_packet(), mrpt::hwdrivers::CGenericSensor::isVerboseEnabled(), mrpt::hwdrivers::CGPSInterface::JAVAD_sendMessage(), mrpt::hwdrivers::CGPSInterface::legacy_topcon_setup_commands(), mrpt::hwdrivers::CSickLaserSerial::LMS_setupBaudrate(), mrpt::hwdrivers::CSickLaserSerial::LMS_setupSerialComms(), mrpt::hwdrivers::CSickLaserSerial::LMS_waitIncomingFrame(), mrpt::hwdrivers::CGPSInterface::OnConnectionEstablished(), mrpt::hwdrivers::CGPSInterface::OnConnectionShutdown(), mrpt::hwdrivers::CSickLaserSerial::SendCommandToSICK(), mrpt::hwdrivers::CNationalInstrumentsDAQ::stop(), and mrpt::hwdrivers::CGPSInterface::tryToOpenTheCOM().