Detailed Description
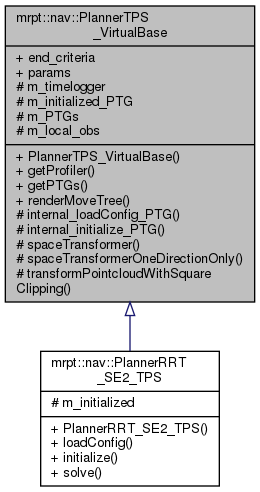
Virtual base class for TP-Space-based path planners.
Definition at line 103 of file PlannerRRT_common.h.
#include <mrpt/nav/planners/PlannerRRT_common.h>
Classes | |
| struct | TRenderPlannedPathOptions |
| Options for renderMoveTree() More... | |
Public Member Functions | |
| PlannerTPS_VirtualBase () | |
| ctor More... | |
| mrpt::utils::CTimeLogger & | getProfiler () |
| const mrpt::nav::TListPTGPtr & | getPTGs () const |
| template<typename node_pose_t , typename world_limits_t , typename tree_t > | |
| void | renderMoveTree (mrpt::opengl::COpenGLScene &scene, const TPlannerInputTempl< node_pose_t, world_limits_t > &pi, const TPlannerResultTempl< tree_t > &result, const TRenderPlannedPathOptions &options) |
Public Attributes | |
| RRTEndCriteria | end_criteria |
| RRTAlgorithmParams | params |
| Parameters specific to this path solver algorithm. More... | |
Protected Member Functions | |
| void | internal_loadConfig_PTG (const mrpt::utils::CConfigFileBase &cfgSource, const std::string &sSectionName=std::string("PTG_CONFIG")) |
| Load all PTG params from a config file source. More... | |
| void | internal_initialize_PTG () |
Must be called after setting all params (see internal_loadConfig_PTG()) and before calling solve() More... | |
| void | spaceTransformer (const mrpt::maps::CSimplePointsMap &in_obstacles, const mrpt::nav::CParameterizedTrajectoryGenerator *in_PTG, const double MAX_DIST, std::vector< double > &out_TPObstacles) |
| void | spaceTransformerOneDirectionOnly (const int tp_space_k_direction, const mrpt::maps::CSimplePointsMap &in_obstacles, const mrpt::nav::CParameterizedTrajectoryGenerator *in_PTG, const double MAX_DIST, double &out_TPObstacle_k) |
Static Protected Member Functions | |
| static void | transformPointcloudWithSquareClipping (const mrpt::maps::CPointsMap &in_map, mrpt::maps::CPointsMap &out_map, const mrpt::poses::CPose2D &asSeenFrom, const double MAX_DIST_XY) |
Protected Attributes | |
| mrpt::utils::CTimeLogger | m_timelogger |
| bool | m_initialized_PTG |
| mrpt::nav::TListPTGPtr | m_PTGs |
| mrpt::maps::CSimplePointsMap | m_local_obs |
Constructor & Destructor Documentation
◆ PlannerTPS_VirtualBase()
| PlannerTPS_VirtualBase::PlannerTPS_VirtualBase | ( | ) |
ctor
Definition at line 39 of file PlannerRRT_common.cpp.
Member Function Documentation
◆ getProfiler()
|
inline |
Definition at line 111 of file PlannerRRT_common.h.
◆ getPTGs()
|
inline |
Definition at line 112 of file PlannerRRT_common.h.
◆ internal_initialize_PTG()
|
protected |
Must be called after setting all params (see internal_loadConfig_PTG()) and before calling solve()
Definition at line 44 of file PlannerRRT_common.cpp.
References ASSERTMSG_, mrpt::format(), mrpt::math::TPolygon2D::getPlotData(), m_initialized_PTG, m_PTGs, m_timelogger, mrpt::math::CPolygon::setAllVertices(), mrpt::nav::CPTG_RobotShape_Polygonal::setRobotShape(), and mrpt::nav::CPTG_RobotShape_Circular::setRobotShapeRadius().
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::initialize().
◆ internal_loadConfig_PTG()
|
protected |
Load all PTG params from a config file source.
Definition at line 88 of file PlannerRRT_common.cpp.
References ASSERT_, mrpt::nav::CParameterizedTrajectoryGenerator::CreatePTG(), mrpt::format(), m_PTGs, mrpt::utils::CConfigFileBase::read_double(), mrpt::utils::CConfigFileBase::read_int(), mrpt::utils::CConfigFileBase::read_string(), and THROW_EXCEPTION_FMT.
Referenced by mrpt::nav::PlannerRRT_SE2_TPS::loadConfig().
◆ renderMoveTree()
| void mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree | ( | mrpt::opengl::COpenGLScene & | scene, |
| const TPlannerInputTempl< node_pose_t, world_limits_t > & | pi, | ||
| const TPlannerResultTempl< tree_t > & | result, | ||
| const TRenderPlannedPathOptions & | options | ||
| ) |
Definition at line 25 of file impl_renderMoveTree.h.
References ASSERT_, ASSERT_ABOVE_, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_goal, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_ground_xy_grid, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_last_edge, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_local_obstacles, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_normal_edge, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_obstacles, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_optimal_edge, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_start, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::color_vehicle, mrpt::opengl::stock_objects::CornerXYZ(), mrpt::opengl::stock_objects::CornerXYZSimple(), mrpt::opengl::CGridPlaneXY::Create(), mrpt::opengl::CPointCloud::Create(), mrpt::opengl::CSetOfLines::Create(), mrpt::opengl::CText3D::Create(), mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::draw_obstacles, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::draw_shape_decimation, mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::goal_pose, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::ground_xy_grid_frequency, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::highlight_last_added_edge, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::highlight_path_to_node_id, mrpt::opengl::COpenGLScene::insert(), INVALID_NODEID, mrpt::utils::keep_max(), mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::local_obs_from_nearest_pose, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::log_msg, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::log_msg_position, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::log_msg_scale, M_PI, m_PTGs, mrpt::nav::TPlannerResultTempl< tree_t >::move_tree, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::new_state, mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::obstacles_points, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::point_size_local_obstacles, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::point_size_obstacles, R, mrpt::nav::CParameterizedTrajectoryGenerator::renderPathAsSimpleLine(), mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::start_pose, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::vehicle_line_width, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::vehicle_shape_z, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::width_last_edge, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::width_normal_edge, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::width_optimal_edge, mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::world_bbox_max, mrpt::nav::TPlannerInputTempl< node_pose_t, world_limits_t >::world_bbox_min, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::x_nearest_pose, mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::x_rand_pose, and mrpt::nav::PlannerTPS_VirtualBase::TRenderPlannedPathOptions::xyzcorners_scale.
◆ spaceTransformer()
|
protected |
Definition at line 160 of file PlannerRRT_common.cpp.
References mrpt::format(), mrpt::maps::CPointsMap::getPointsBuffer(), mrpt::nav::CParameterizedTrajectoryGenerator::initTPObstacles(), MAX_DIST, and mrpt::nav::CParameterizedTrajectoryGenerator::updateTPObstacle().
◆ spaceTransformerOneDirectionOnly()
|
protected |
◆ transformPointcloudWithSquareClipping()
|
staticprotected |
Definition at line 126 of file PlannerRRT_common.cpp.
References mrpt::maps::CMetricMap::clear(), mrpt::poses::CPose2D::composePoint(), mrpt::maps::CPointsMap::getPointsBuffer(), mrpt::maps::CPointsMap::insertPointFast(), mrpt::maps::CPointsMap::reserve(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), and mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y().
Member Data Documentation
◆ end_criteria
| RRTEndCriteria mrpt::nav::PlannerTPS_VirtualBase::end_criteria |
Definition at line 106 of file PlannerRRT_common.h.
◆ m_initialized_PTG
|
protected |
Definition at line 197 of file PlannerRRT_common.h.
Referenced by internal_initialize_PTG().
◆ m_local_obs
|
protected |
Definition at line 199 of file PlannerRRT_common.h.
◆ m_PTGs
|
protected |
Definition at line 198 of file PlannerRRT_common.h.
Referenced by internal_initialize_PTG(), internal_loadConfig_PTG(), and renderMoveTree().
◆ m_timelogger
|
protected |
Definition at line 196 of file PlannerRRT_common.h.
Referenced by internal_initialize_PTG().
◆ params
| RRTAlgorithmParams mrpt::nav::PlannerTPS_VirtualBase::params |
Parameters specific to this path solver algorithm.
Definition at line 107 of file PlannerRRT_common.h.