Detailed Description
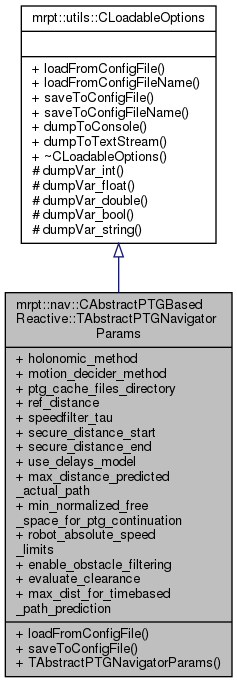
Definition at line 136 of file CAbstractPTGBasedReactive.h.
#include <mrpt/nav/reactive/CAbstractPTGBasedReactive.h>
Public Member Functions | |
| virtual void | loadFromConfigFile (const mrpt::utils::CConfigFileBase &c, const std::string &s) MRPT_OVERRIDE |
| This method load the options from a ".ini"-like file or memory-stored string list. More... | |
| virtual void | saveToConfigFile (mrpt::utils::CConfigFileBase &c, const std::string &s) const MRPT_OVERRIDE |
| This method saves the options to a ".ini"-like file or memory-stored string list. More... | |
| TAbstractPTGNavigatorParams () | |
| void | loadFromConfigFileName (const std::string &config_file, const std::string §ion) |
| Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file. More... | |
| void | saveToConfigFileName (const std::string &config_file, const std::string §ion) const |
| Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file. More... | |
| void | dumpToConsole () const |
| Just like dumpToTextStream() but sending the text to the console (std::cout) More... | |
| virtual void | dumpToTextStream (mrpt::utils::CStream &out) const |
| This method should clearly display all the contents of the structure in textual form, sending it to a CStream. More... | |
Public Attributes | |
| std::string | holonomic_method |
| C++ class name of the holonomic navigation method to run in the transformed TP-Space. More... | |
| std::string | motion_decider_method |
| C++ class name of the motion chooser. More... | |
| std::string | ptg_cache_files_directory |
| (Default: ".") More... | |
| double | ref_distance |
| Maximum distance up to obstacles will be considered (D_{max} in papers). More... | |
| double | speedfilter_tau |
| Time constant (in seconds) for the low-pass filter applied to kinematic velocity commands (default=0: no filtering) More... | |
| double | secure_distance_start |
| In normalized distances, the start and end of a ramp function that scales the velocity output from the holonomic navigator: More... | |
| double | secure_distance_end |
| bool | use_delays_model |
| double | max_distance_predicted_actual_path |
| Max distance [meters] to discard current PTG and issue a new vel cmd (default= 0.05) More... | |
| double | min_normalized_free_space_for_ptg_continuation |
| Min normalized dist [0,1] after current pose in a PTG continuation to allow it. More... | |
| mrpt::kinematics::CVehicleVelCmd::TVelCmdParams | robot_absolute_speed_limits |
| Params related to speed limits. More... | |
| bool | enable_obstacle_filtering |
| bool | evaluate_clearance |
| Default: false. More... | |
| double | max_dist_for_timebased_path_prediction |
| Max dist [meters] to use time-based path prediction for NOP evaluation. More... | |
Static Protected Member Functions | |
| static void | dumpVar_int (CStream &out, const char *varName, int v) |
| Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR. More... | |
| static void | dumpVar_float (CStream &out, const char *varName, float v) |
| static void | dumpVar_double (CStream &out, const char *varName, double v) |
| static void | dumpVar_bool (CStream &out, const char *varName, bool v) |
| static void | dumpVar_string (CStream &out, const char *varName, const std::string &v) |
Constructor & Destructor Documentation
◆ TAbstractPTGNavigatorParams()
| CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::TAbstractPTGNavigatorParams | ( | ) |
Definition at line 1544 of file CAbstractPTGBasedReactive.cpp.
Member Function Documentation
◆ dumpToConsole()
|
inherited |
Just like dumpToTextStream() but sending the text to the console (std::cout)
Definition at line 47 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::dumpToTextStream(), and loadable_opts_my_cout.
Referenced by mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), mrpt::hmtslam::CHMTSLAM::loadOptions(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::printParams().
◆ dumpToTextStream()
|
virtualinherited |
This method should clearly display all the contents of the structure in textual form, sending it to a CStream.
The default implementation in this base class relies on saveToConfigFile() to generate a plain text representation of all the parameters.
Reimplemented in mrpt::vision::TMultiResDescOptions, mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::TLoopClosureParams, mrpt::vision::TMultiResDescMatchOptions, mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::TLaserParams, mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions, mrpt::hmtslam::CHMTSLAM::TOptions, mrpt::maps::COccupancyGridMap2D::TInsertionOptions, mrpt::vision::TMatchingOptions, mrpt::maps::TSetOfMetricMapInitializers, mrpt::maps::CLandmarksMap::TLikelihoodOptions, mrpt::maps::CColouredPointsMap::TColourOptions, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::GraphVisualizationParams, mrpt::maps::CPointsMap::TLikelihoodOptions, mrpt::maps::CLandmarksMap::TInsertionOptions, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::TParams, mrpt::vision::TStereoSystemParams, mrpt::maps::CPointsMap::TInsertionOptions, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::OptimizationParams, mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::TParams, mrpt::maps::COctoMapBase< octree_t, octree_node_t >::TLikelihoodOptions, mrpt::slam::CRangeBearingKFSLAM::TOptions, mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::TParams, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::TParams, mrpt::maps::CBeaconMap::TInsertionOptions, mrpt::maps::CRandomFieldGridMap3D::TInsertionOptions, mrpt::maps::CMultiMetricMapPDF::TPredictionParams, mrpt::maps::CBeaconMap::TLikelihoodOptions, mrpt::slam::CRangeBearingKFSLAM2D::TOptions, mrpt::maps::CHeightGridMap2D::TInsertionOptions, mrpt::graphslam::TSlidingWindow, mrpt::slam::CGridMapAligner::TConfigParams, mrpt::bayes::CParticleFilter::TParticleFilterOptions, mrpt::maps::COctoMapBase< octree_t, octree_node_t >::TInsertionOptions, mrpt::bayes::TKF_options, mrpt::maps::CReflectivityGridMap2D::TInsertionOptions, mrpt::vision::CFeatureExtraction::TOptions, mrpt::graphslam::TUncertaintyPath< GRAPH_T >, mrpt::maps::TMapGenericParams, mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions, mrpt::hmtslam::CTopLCDetector_GridMatching::TOptions, mrpt::hmtslam::CTopLCDetector_FabMap::TOptions, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions, mrpt::slam::CICP::TConfigParams, mrpt::slam::CIncrementalMapPartitioner::TOptions, mrpt::maps::CHeightGridMap2D_MRF::TInsertionOptions, mrpt::maps::CWirelessPowerGridMap2D::TInsertionOptions, mrpt::slam::CMetricMapBuilderICP::TConfigParams, mrpt::maps::TMetricMapInitializer, mrpt::vision::CCamModel, and mrpt::slam::TKLDParams.
Definition at line 80 of file CLoadableOptions.cpp.
References mrpt::utils::CConfigFileMemory::getContent(), mrpt::utils::CStream::printf(), and mrpt::utils::CLoadableOptions::saveToConfigFile().
Referenced by mrpt::utils::CLoadableOptions::dumpToConsole().
◆ dumpVar_bool()
|
staticprotectedinherited |
Definition at line 67 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_double()
|
staticprotectedinherited |
Definition at line 62 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_float()
|
staticprotectedinherited |
Definition at line 57 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_int()
|
staticprotectedinherited |
Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR.
Definition at line 52 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_string()
|
staticprotectedinherited |
Definition at line 72 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ loadFromConfigFile()
|
virtual |
This method load the options from a ".ini"-like file or memory-stored string list.
Only those parameters found in the given "section" and having the same name that the variable are loaded. Those not found in the file will stay with their previous values (usually the default values loaded at initialization). An example of an ".ini" file:
- See also
- loadFromConfigFileName, saveToConfigFile
Implements mrpt::utils::CLoadableOptions.
Definition at line 1488 of file CAbstractPTGBasedReactive.cpp.
References MRPT_END, MRPT_LOAD_CONFIG_VAR_CS, MRPT_LOAD_CONFIG_VAR_REQUIRED_CS, and MRPT_START.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::loadConfigFile().
◆ loadFromConfigFileName()
|
inherited |
Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file.
- See also
- loadFromConfigFile
Definition at line 23 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::loadFromConfigFile().
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::loadParams().
◆ saveToConfigFile()
|
virtual |
This method saves the options to a ".ini"-like file or memory-stored string list.
- See also
- loadFromConfigFile, saveToConfigFileName
Reimplemented from mrpt::utils::CLoadableOptions.
Definition at line 1510 of file CAbstractPTGBasedReactive.cpp.
References CLASS_ID, mrpt::utils::getAllRegisteredClassesChildrenOf(), and MRPT_SAVE_CONFIG_VAR_COMMENT.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::saveConfigFile().
◆ saveToConfigFileName()
|
inherited |
Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file.
- See also
- saveToConfigFile, loadFromConfigFileName
Definition at line 39 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::saveToConfigFile().
Member Data Documentation
◆ enable_obstacle_filtering
| bool mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::enable_obstacle_filtering |
Definition at line 167 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::loadConfigFile().
◆ evaluate_clearance
| bool mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::evaluate_clearance |
Default: false.
Definition at line 168 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate().
◆ holonomic_method
| std::string mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::holonomic_method |
C++ class name of the holonomic navigation method to run in the transformed TP-Space.
Definition at line 138 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::loadConfigFile().
◆ max_dist_for_timebased_path_prediction
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::max_dist_for_timebased_path_prediction |
Max dist [meters] to use time-based path prediction for NOP evaluation.
Definition at line 169 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores().
◆ max_distance_predicted_actual_path
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::max_distance_predicted_actual_path |
Max distance [meters] to discard current PTG and issue a new vel cmd (default= 0.05)
Definition at line 163 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores().
◆ min_normalized_free_space_for_ptg_continuation
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::min_normalized_free_space_for_ptg_continuation |
Min normalized dist [0,1] after current pose in a PTG continuation to allow it.
Definition at line 164 of file CAbstractPTGBasedReactive.h.
◆ motion_decider_method
| std::string mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::motion_decider_method |
C++ class name of the motion chooser.
Definition at line 139 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::loadConfigFile().
◆ ptg_cache_files_directory
| std::string mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::ptg_cache_files_directory |
(Default: ".")
Definition at line 141 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CReactiveNavigationSystem::STEP1_InitPTGs(), and mrpt::nav::CReactiveNavigationSystem3D::STEP1_InitPTGs().
◆ ref_distance
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::ref_distance |
Maximum distance up to obstacles will be considered (D_{max} in papers).
Definition at line 142 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CReactiveNavigationSystem3D::implementSenseObstacles(), and mrpt::nav::CReactiveNavigationSystem::STEP3_WSpaceToTPSpace().
◆ robot_absolute_speed_limits
| mrpt::kinematics::CVehicleVelCmd::TVelCmdParams mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::robot_absolute_speed_limits |
Params related to speed limits.
Definition at line 166 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::changeCurrentRobotSpeedLimits(), mrpt::nav::CAbstractPTGBasedReactive::generate_vel_cmd(), and mrpt::nav::CAbstractPTGBasedReactive::getCurrentRobotSpeedLimits().
◆ secure_distance_end
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::secure_distance_end |
Definition at line 161 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate().
◆ secure_distance_start
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::secure_distance_start |
In normalized distances, the start and end of a ramp function that scales the velocity output from the holonomic navigator:
Definition at line 161 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate().
◆ speedfilter_tau
| double mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::speedfilter_tau |
Time constant (in seconds) for the low-pass filter applied to kinematic velocity commands (default=0: no filtering)
Definition at line 143 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::generate_vel_cmd().
◆ use_delays_model
| bool mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams::use_delays_model |
Definition at line 162 of file CAbstractPTGBasedReactive.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().