Example: math_spline_interpolation¶
C++ example source code:
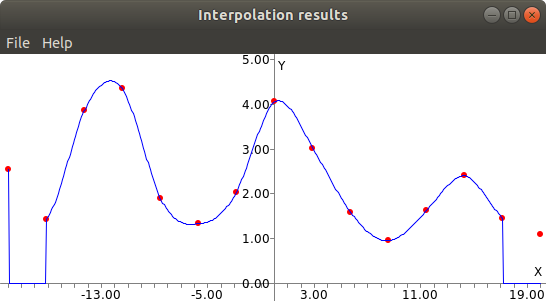
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2021, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/gui/CDisplayWindowPlots.h> #include <mrpt/math/CSplineInterpolator1D.h> #include <mrpt/math/utils.h> #include <mrpt/poses/CPose3D.h> #include <mrpt/poses/CPose3DInterpolator.h> #include <mrpt/random.h> #include <mrpt/system/datetime.h> #include <mrpt/system/os.h> #include <iostream> #include <mrpt/math/interp_fit.hpp> using namespace mrpt::gui; using namespace mrpt::random; using namespace mrpt::math; using namespace std; // ------------------------------------------------------ // TestCapture // ------------------------------------------------------ void TestCPose3DInterpolation() { mrpt::Clock::time_point iniTs = mrpt::Clock::now(); mrpt::Clock::time_point ts = iniTs; mrpt::Clock::time_point ots = iniTs; mrpt::poses::CPose3D pose(0, 0, 0, 0, 0, 0); mrpt::poses::CPose3DInterpolator poseInt; std::vector<mrpt::poses::CPose3D> p; mrpt::poses::CPose3D outPose(0, 0, 0, 0, 0, 0); bool valid; FILE* f = mrpt::system::os::fopen("interpolation.txt", "wt"); // Set the maximum value of the interval time for considering interpolation poseInt.setMaxTimeInterpolation(std::chrono::seconds(1)); poseInt.insert(ts, pose); // First point ts += std::chrono::seconds(1); pose.setFromValues(1, 1, 0, 0, 1, 0); poseInt.insert(ts, pose); // Second point ts += std::chrono::seconds(1); pose.setFromValues(2, 2.5, 1, 0, 1.3, 0); poseInt.insert(ts, pose); // Third point ts += std::chrono::seconds(1); pose.setFromValues(3, 1.7, 2, 0, 1.57, 0); poseInt.insert(ts, pose); // Fourth point unsigned int i; for (i = 0, ots = iniTs; ots <= iniTs + std::chrono::seconds(3); ots += std::chrono::milliseconds(100), i++) { poseInt.interpolate(ots, outPose, valid); p.push_back(outPose); mrpt::system::os::fprintf( f, "%d %f %f %f %f %f %f\n", i, outPose.x(), outPose.y(), outPose.z(), outPose.yaw(), outPose.pitch(), outPose.roll()); } mrpt::system::os::fclose(f); } // end TestCPose3DInterpolation void TestSplineInterpolation() { FILE* f = mrpt::system::os::fopen("out2", "wt"); CVectorDouble x, y; double t; x.resize(4); y.resize(4); // x[0] = 0.0; x[1] = 1.0; x[2] = 2.0; x[3] = 4.0; // y[0] = 0.0; y[1] = 1.0; y[2] = 1.8; y[3] = 1.6; x[0] = -1.5; x[1] = -0.5; x[2] = 0.5; x[3] = 1.5; y[0] = 3.14; y[1] = -3.10; y[2] = -3.05; y[3] = 3.10; CVectorDouble ts, ys_interp; for (t = x[1]; t <= x[2]; t += 0.01) { double w = mrpt::math::spline(t, x, y); // wrap no // double w = mrpt::math::spline(t, x, y, true); // wrap yes ts.push_back(t); ys_interp.push_back(w); mrpt::system::os::fprintf(f, "%f %f\n", t, w); } mrpt::system::os::fclose(f); cout << "Done" << endl; #if MRPT_HAS_WXWIDGETS CDisplayWindowPlots figure("Interpolation results"); figure.plot(x, y, "r.4", "true points"); figure.plot(ts, ys_interp, "b", "interp"); figure.axis_equal(); figure.axis_fit(); figure.waitForKey(); #endif } void TestSplineInterpolationVector() { const size_t N = 15; CVectorDouble data_x, data_y(N); // Create random data: mrpt::math::linspace(-20.0, 20.0, N, data_x); getRandomGenerator().drawGaussian1DVector(data_y, 2.0, 1.0); // Create interpolator mrpt::math::CSplineInterpolator1D interp(data_x, data_y); // Generate sequence of where to interpolate: CVectorDouble xs; mrpt::math::linspace(-20.0, 20.0, 500, xs); CVectorDouble ys; bool valid = interp.queryVector(xs, ys); ASSERT_(valid); #if MRPT_HAS_WXWIDGETS CDisplayWindowPlots figure("Interpolation results"); figure.plot(data_x, data_y, "r.6", "true points"); figure.plot(xs, ys, "b", "interp"); figure.axis_equal(); figure.axis_fit(); figure.waitForKey(); #endif } int main(int argc, char** argv) { try { TestSplineInterpolationVector(); // TestSplineInterpolation(); // TestCPose3DInterpolation(); return 0; } catch (const std::exception& e) { std::cerr << "MRPT error: " << mrpt::exception_to_str(e) << std::endl; return -1; } catch (...) { printf("Another exception!!"); return -1; } }