Detailed Description
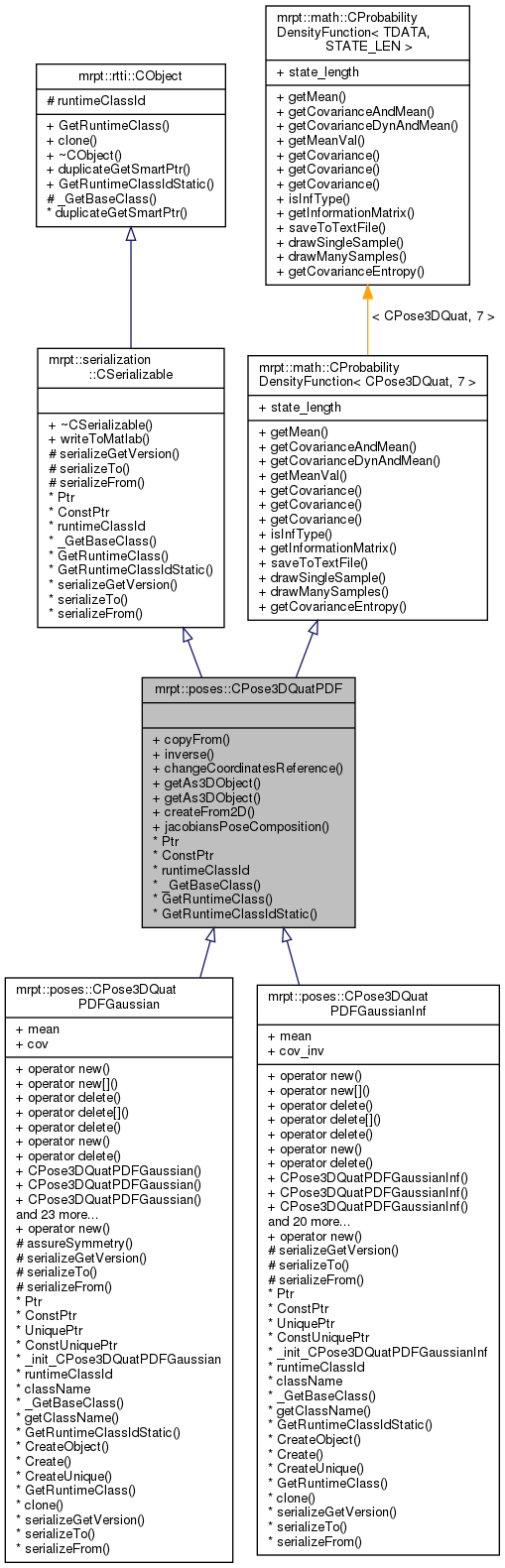
Declares a class that represents a Probability Density Function (PDF) of a 3D pose (6D actually), by means of a 7-vector with a translation [x y z] and a quaternion [qr qx qy qz].
This class is just the base class for unifying many diferent ways this PDF can be implemented.
For convenience, a pose composition is also defined for any PDF derived class, changeCoordinatesReference, in the form of a method rather than an operator.
- For a similar class for 3D points (without attitude), see CPointPDF.
- For a similar class for 3D poses (with Euler angles instead of quaternions), see CPose3DPDF.
See also the tutorial on probabilistic spatial representations in the MRPT.
- See also
- CPose3DQuatPDF, CPose3DPDF
Definition at line 44 of file CPose3DQuatPDF.h.
#include <mrpt/poses/CPose3DQuatPDF.h>
Public Types | |
| using | type_value = CPose3DQuat |
| The type of the state the PDF represents. More... | |
| using | self_t = CProbabilityDensityFunction< CPose3DQuat, STATE_LEN > |
Public Member Functions | |
| virtual void | copyFrom (const CPose3DQuatPDF &o)=0 |
| Copy operator, translating if necesary (for example, between particles and gaussian representations) More... | |
| virtual void | inverse (CPose3DQuatPDF &o) const =0 |
| Returns a new PDF such as: NEW_PDF = (0,0,0) - THIS_PDF. More... | |
| virtual void | changeCoordinatesReference (const CPose3D &newReferenceBase)=0 |
| template<class OPENGL_SETOFOBJECTSPTR > | |
| void | getAs3DObject (OPENGL_SETOFOBJECTSPTR &out_obj) const |
| Returns a 3D representation of this PDF (it doesn't clear the current contents of out_obj, but append new OpenGL objects to that list) More... | |
| template<class OPENGL_SETOFOBJECTSPTR > | |
| OPENGL_SETOFOBJECTSPTR | getAs3DObject () const |
| Returns a 3D representation of this PDF. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| virtual CObject * | clone () const =0 |
| Returns a deep copy (clone) of the object, indepently of its class. More... | |
| virtual void | getMean (CPose3DQuat &mean_point) const=0 |
| Returns the mean, or mathematical expectation of the probability density distribution (PDF). More... | |
| virtual void | getCovarianceAndMean (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &cov, CPose3DQuat &mean_point) const=0 |
| Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once. More... | |
| void | getCovarianceDynAndMean (mrpt::math::CMatrixDouble &cov, CPose3DQuat &mean_point) const |
| Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once. More... | |
| CPose3DQuat | getMeanVal () const |
| Returns the mean, or mathematical expectation of the probability density distribution (PDF). More... | |
| void | getCovariance (mrpt::math::CMatrixDouble &cov) const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| void | getCovariance (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &cov) const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > | getCovariance () const |
| Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix) More... | |
| virtual bool | isInfType () const |
| Returns whether the class instance holds the uncertainty in covariance or information form. More... | |
| virtual void | getInformationMatrix (mrpt::math::CMatrixFixedNumeric< double, STATE_LEN, STATE_LEN > &inf) const |
| Returns the information (inverse covariance) matrix (a STATE_LEN x STATE_LEN matrix) Unless reimplemented in derived classes, this method first reads the covariance, then invert it. More... | |
| virtual bool | saveToTextFile (const std::string &file) const=0 |
| Save PDF's particles to a text file. More... | |
| virtual void | drawSingleSample (CPose3DQuat &outPart) const=0 |
| Draws a single sample from the distribution. More... | |
| virtual void | drawManySamples (size_t N, std::vector< mrpt::math::CVectorDouble > &outSamples) const |
| Draws a number of samples from the distribution, and saves as a list of 1xSTATE_LEN vectors, where each row contains a (x,y,z,yaw,pitch,roll) datum. More... | |
| double | getCovarianceEntropy () const |
| Compute the entropy of the estimated covariance matrix. More... | |
RTTI classes and functions for polymorphic hierarchies | |
| mrpt::rtti::CObject::Ptr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static CPose3DQuatPDF * | createFrom2D (const CPosePDF &o) |
| This is a static transformation method from 2D poses to 3D PDFs, preserving the representation type (particles->particles, Gaussians->Gaussians,etc) It returns a new object of any of the derived classes of CPose3DQuatPDF. More... | |
| static void | jacobiansPoseComposition (const CPose3DQuat &x, const CPose3DQuat &u, mrpt::math::CMatrixDouble77 &df_dx, mrpt::math::CMatrixDouble77 &df_du, CPose3DQuat *out_x_oplus_u=nullptr) |
| This static method computes the two Jacobians of a pose composition operation $f(x,u)= x \oplus u$. More... | |
Static Public Attributes | |
| static constexpr size_t | state_length |
| The length of the variable, for example, 3 for a 3D point, 6 for a 3D pose (x y z yaw pitch roll). More... | |
Protected Member Functions | |
CSerializable virtual methods | |
| virtual uint8_t | serializeGetVersion () const =0 |
| Must return the current versioning number of the object. More... | |
| virtual void | serializeTo (CArchive &out) const =0 |
| Pure virtual method for writing (serializing) to an abstract archive. More... | |
| virtual void | serializeFrom (CArchive &in, uint8_t serial_version)=0 |
| Pure virtual method for reading (deserializing) from an abstract archive. More... | |
RTTI stuff <br> | |
| using | Ptr = std::shared_ptr< CPose3DQuatPDF > |
| using | ConstPtr = std::shared_ptr< const CPose3DQuatPDF > |
| static const mrpt::rtti::TRuntimeClassId | runtimeClassId |
| static const mrpt::rtti::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::rtti::TRuntimeClassId * | GetRuntimeClass () const override |
| Returns information about the class of an object in runtime. More... | |
| static const mrpt::rtti::TRuntimeClassId & | GetRuntimeClassIdStatic () |
Member Typedef Documentation
◆ ConstPtr
| using mrpt::poses::CPose3DQuatPDF::ConstPtr = std::shared_ptr<const CPose3DQuatPDF > |
Definition at line 48 of file CPose3DQuatPDF.h.
◆ Ptr
| using mrpt::poses::CPose3DQuatPDF::Ptr = std::shared_ptr< CPose3DQuatPDF > |
Definition at line 48 of file CPose3DQuatPDF.h.
◆ self_t
|
inherited |
Definition at line 34 of file CProbabilityDensityFunction.h.
◆ type_value
|
inherited |
The type of the state the PDF represents.
Definition at line 33 of file CProbabilityDensityFunction.h.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ changeCoordinatesReference()
|
pure virtual |
Implemented in mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DQuatPDFGaussian.
◆ clone()
|
pure virtualinherited |
Returns a deep copy (clone) of the object, indepently of its class.
Implemented in MyNS::Bar, MyNS::Foo, mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, MyNS::Foo, mrpt::serialization::CMemoryChunkBase< Derived >, MyNS::MyDerived1, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CMultiObjMotionOpt_Scalarization, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, mrpt::math::CMatrix, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::img::TStereoCamera, mrpt::img::TCamera, mrpt::img::CImage, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CPropertiesValuesList, mrpt::hmtslam::CMHPropertiesValuesList, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::db::CSimpleDatabase, and mrpt::db::CSimpleDatabaseTable.
Referenced by mrpt::rtti::CObject::duplicateGetSmartPtr(), mrpt::obs::CActionCollection::insert(), mrpt::maps::CSimpleMap::insert(), and mrpt::poses::CPoseRandomSampler::setPosePDF().
◆ copyFrom()
|
pure virtual |
Copy operator, translating if necesary (for example, between particles and gaussian representations)
- See also
- createFrom2D
Implemented in mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DQuatPDFGaussian.
◆ createFrom2D()
|
static |
This is a static transformation method from 2D poses to 3D PDFs, preserving the representation type (particles->particles, Gaussians->Gaussians,etc) It returns a new object of any of the derived classes of CPose3DQuatPDF.
This object must be deleted by the user when not required anymore.
- See also
- copyFrom
Definition at line 26 of file CPose3DQuatPDF.cpp.
References MRPT_END, and MRPT_START.
◆ drawManySamples()
|
inlinevirtualinherited |
Draws a number of samples from the distribution, and saves as a list of 1xSTATE_LEN vectors, where each row contains a (x,y,z,yaw,pitch,roll) datum.
This base method just call N times to drawSingleSample, but derived classes should implemented optimized method for each particular PDF.
Reimplemented in mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DQuatPDFGaussian.
Definition at line 152 of file CProbabilityDensityFunction.h.
◆ drawSingleSample()
|
pure virtualinherited |
Draws a single sample from the distribution.
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 168 of file CObject.h.
References mrpt::rtti::CObject::clone().
Referenced by mrpt::obs::CRawlog::addActions(), and mrpt::obs::CRawlog::addObservations().
◆ getAs3DObject() [1/2]
|
inline |
Returns a 3D representation of this PDF.
- Note
- Needs the mrpt-opengl library, and using mrpt::opengl::CSetOfObjects::Ptr as template argument.
Definition at line 107 of file CPose3DQuatPDF.h.
References mrpt::opengl::posePDF2opengl().
◆ getAs3DObject() [2/2]
|
inline |
Returns a 3D representation of this PDF (it doesn't clear the current contents of out_obj, but append new OpenGL objects to that list)
- Note
- Needs the mrpt-opengl library, and using mrpt::opengl::CSetOfObjects::Ptr as template argument.
- By default, ellipsoids for the confidence intervals of "q=3" are drawn; for more mathematical details, see CGeneralizedEllipsoidTemplate::setQuantiles()
Definition at line 96 of file CPose3DQuatPDF.h.
References mrpt::opengl::posePDF2opengl().
◆ getCovariance() [1/3]
|
inlineinherited |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getInformationMatrix
Definition at line 101 of file CProbabilityDensityFunction.h.
◆ getCovariance() [2/3]
|
inlineinherited |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getCovarianceAndMean, getInformationMatrix
Definition at line 78 of file CProbabilityDensityFunction.h.
◆ getCovariance() [3/3]
|
inlineinherited |
Returns the estimate of the covariance matrix (STATE_LEN x STATE_LEN covariance matrix)
- See also
- getMean, getCovarianceAndMean, getInformationMatrix
Definition at line 88 of file CProbabilityDensityFunction.h.
◆ getCovarianceAndMean()
|
pure virtualinherited |
Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once.
- See also
- getMean, getInformationMatrix
◆ getCovarianceDynAndMean()
|
inlineinherited |
Returns an estimate of the pose covariance matrix (STATE_LENxSTATE_LEN cov matrix) and the mean, both at once.
- See also
- getMean, getInformationMatrix
Definition at line 54 of file CProbabilityDensityFunction.h.
◆ getCovarianceEntropy()
|
inlineinherited |
Compute the entropy of the estimated covariance matrix.
Definition at line 168 of file CProbabilityDensityFunction.h.
◆ getInformationMatrix()
|
inlinevirtualinherited |
Returns the information (inverse covariance) matrix (a STATE_LEN x STATE_LEN matrix) Unless reimplemented in derived classes, this method first reads the covariance, then invert it.
- See also
- getMean, getCovarianceAndMean
Definition at line 124 of file CProbabilityDensityFunction.h.
◆ getMean()
|
pure virtualinherited |
Returns the mean, or mathematical expectation of the probability density distribution (PDF).
- See also
- getCovarianceAndMean, getInformationMatrix
◆ getMeanVal()
|
inlineinherited |
Returns the mean, or mathematical expectation of the probability density distribution (PDF).
- See also
- getCovariance, getInformationMatrix
Definition at line 67 of file CProbabilityDensityFunction.h.
◆ GetRuntimeClass()
|
overridevirtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::serialization::CSerializable.
Reimplemented in mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DQuatPDFGaussian.
Referenced by mrpt::poses::CPose3DQuatPDFGaussian::inverse(), and mrpt::poses::CPose3DQuatPDFGaussianInf::inverse().
◆ GetRuntimeClassIdStatic()
|
static |
◆ inverse()
|
pure virtual |
Returns a new PDF such as: NEW_PDF = (0,0,0) - THIS_PDF.
Implemented in mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DQuatPDFGaussian.
◆ isInfType()
|
inlinevirtualinherited |
Returns whether the class instance holds the uncertainty in covariance or information form.
- Note
- By default this is going to be covariance form. *Inf classes (e.g. CPosePDFGaussianInf) store it in information form.
- See also
- mrpt::traits::is_inf_type
Reimplemented in mrpt::poses::CPose3DQuatPDFGaussianInf.
Definition at line 117 of file CProbabilityDensityFunction.h.
◆ jacobiansPoseComposition()
|
static |
This static method computes the two Jacobians of a pose composition operation $f(x,u)= x \oplus u$.
- Parameters
-
out_x_oplus_u If set to !=nullptr, the result of "x+u" will be stored here (it will be computed internally anyway). To see the mathematical derivation of the formulas, refer to the technical report here:
Definition at line 41 of file CPose3DQuatPDF.cpp.
References MRPT_MAX_ALIGN_BYTES, mrpt::math::CQuaternion< T >::normalizationJacobian(), mrpt::poses::CPose3DQuat::quat(), mrpt::math::CQuaternion< T >::r(), mrpt::square(), mrpt::math::UNINITIALIZED_MATRIX, mrpt::math::CQuaternion< T >::x(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::x(), mrpt::math::CQuaternion< T >::y(), mrpt::poses::CPoseOrPoint< DERIVEDCLASS >::y(), and mrpt::math::CQuaternion< T >::z().
Referenced by mrpt::poses::CPose3DQuatPDFGaussian::changeCoordinatesReference(), mrpt::poses::CPose3DQuatPDFGaussianInf::changeCoordinatesReference(), mrpt::poses::CPose3DPDF::jacobiansPoseComposition(), mrpt::poses::CPose3DQuatPDFGaussian::operator+=(), mrpt::poses::CPose3DQuatPDFGaussianInf::operator+=(), and Pose3DQuatPDFGaussTests::testCompositionJacobian().
◆ saveToTextFile()
|
pure virtualinherited |
Save PDF's particles to a text file.
See derived classes for more information about the format of generated files.
- Returns
- false on error
Implemented in mrpt::poses::CPose3DQuatPDFGaussianInf, and mrpt::poses::CPose3DQuatPDFGaussian.
◆ serializeFrom()
|
protectedpure virtualinherited |
Pure virtual method for reading (deserializing) from an abstract archive.
Users don't call this method directly. Instead, use stream >> object;.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any I/O error
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, MyNS::Foo, mrpt::serialization::CMemoryChunkBase< Derived >, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, mrpt::math::CMatrix, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::img::TStereoCamera, mrpt::img::TCamera, mrpt::img::CImage, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CPropertiesValuesList, mrpt::hmtslam::CMHPropertiesValuesList, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::db::CSimpleDatabase, and mrpt::db::CSimpleDatabaseTable.
◆ serializeGetVersion()
|
protectedpure virtualinherited |
Must return the current versioning number of the object.
Start in zero for new classes, and increments each time there is a change in the stored format.
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, MyNS::Foo, mrpt::serialization::CMemoryChunkBase< Derived >, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, mrpt::math::CMatrix, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::img::TStereoCamera, mrpt::img::TCamera, mrpt::img::CImage, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CPropertiesValuesList, mrpt::hmtslam::CMHPropertiesValuesList, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::db::CSimpleDatabase, and mrpt::db::CSimpleDatabaseTable.
Referenced by mrpt::serialization::CArchive::WriteObject().
◆ serializeTo()
|
protectedpure virtualinherited |
Pure virtual method for writing (serializing) to an abstract archive.
Users don't call this method directly. Instead, use stream << object;.
- Exceptions
-
std::exception On any I/O error
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, MyNS::Foo, mrpt::serialization::CMemoryChunkBase< Derived >, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, mrpt::math::CMatrix, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::img::TStereoCamera, mrpt::img::TCamera, mrpt::img::CImage, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CPropertiesValuesList, mrpt::hmtslam::CMHPropertiesValuesList, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::db::CSimpleDatabase, and mrpt::db::CSimpleDatabaseTable.
Referenced by mrpt::serialization::CArchive::WriteObject().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or nullptr is class does not support conversion to MATLAB.
Definition at line 68 of file CSerializable.h.
Member Data Documentation
◆ runtimeClassId
|
staticprotected |
Definition at line 48 of file CPose3DQuatPDF.h.
◆ state_length
|
staticconstexprinherited |
The length of the variable, for example, 3 for a 3D point, 6 for a 3D pose (x y z yaw pitch roll).
Definition at line 31 of file CProbabilityDensityFunction.h.