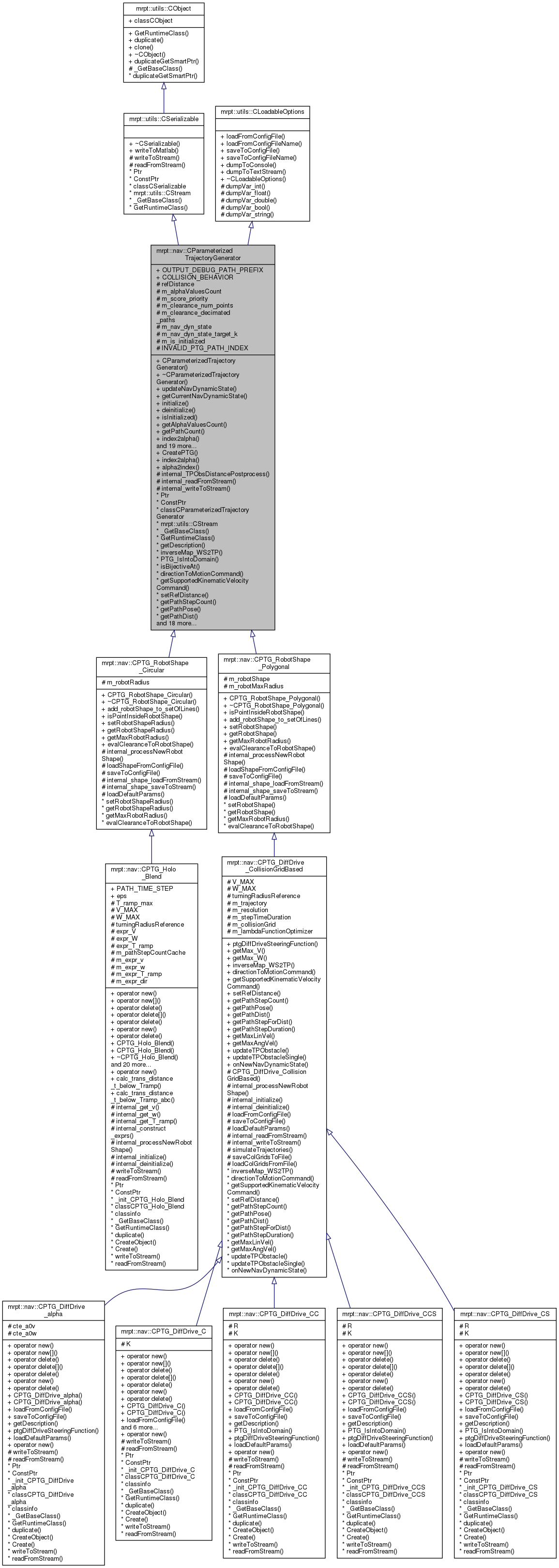
Detailed Description
This is the base class for any user-defined PTG.
There is a class factory interface in CParameterizedTrajectoryGenerator::CreatePTG.
Papers:
- J.L. Blanco, J. Gonzalez-Jimenez, J.A. Fernandez-Madrigal, "Extending Obstacle Avoidance Methods through Multiple Parameter-Space Transformations", Autonomous Robots, vol. 24, no. 1, 2008. http://ingmec.ual.es/~jlblanco/papers/blanco2008eoa_DRAFT.pdf
Changes history:
- 30/JUN/2004: Creation (JLBC)
- 16/SEP/2004: Totally redesigned.
- 15/SEP/2005: Totally rewritten again, for integration into MRPT Applications Repository.
- 19/JUL/2009: Simplified to use only STL data types, and created the class factory interface.
- MAY/2016: Refactored into CParameterizedTrajectoryGenerator, CPTG_DiffDrive_CollisionGridBased, PTG classes renamed.
- 2016-2017: Many features added to support "PTG continuation", dynamic paths depending on vehicle speeds, etc.
Definition at line 60 of file CParameterizedTrajectoryGenerator.h.
#include <mrpt/nav/tpspace/CParameterizedTrajectoryGenerator.h>
Classes | |
| struct | TNavDynamicState |
| Dynamic state that may affect the PTG path parameterization. More... | |
Public Member Functions | |
| CParameterizedTrajectoryGenerator () | |
Default ctor. Must call loadFromConfigFile() before initialization. More... | |
| virtual | ~CParameterizedTrajectoryGenerator () |
| void | updateNavDynamicState (const TNavDynamicState &newState, const bool force_update=false) |
| To be invoked by the navigator before each navigation step, to let the PTG to react to changing dynamic conditions. More... | |
| const TNavDynamicState & | getCurrentNavDynamicState () const |
| void | initialize (const std::string &cacheFilename=std::string(), const bool verbose=true) |
| Must be called after setting all PTG parameters and before requesting converting obstacles to TP-Space, inverseMap_WS2TP(), etc. More... | |
| void | deinitialize () |
| This must be called to de-initialize the PTG if some parameter is to be changed. More... | |
| bool | isInitialized () const |
Returns true if initialize() has been called and there was no errors, so the PTG is ready to be queried for paths, obstacles, etc. More... | |
| uint16_t | getAlphaValuesCount () const |
| Get the number of different, discrete paths in this family. More... | |
| uint16_t | getPathCount () const |
| Get the number of different, discrete paths in this family. More... | |
| double | index2alpha (uint16_t k) const |
| Alpha value for the discrete corresponding value. More... | |
| uint16_t | alpha2index (double alpha) const |
| Discrete index value for the corresponding alpha value. More... | |
| double | getRefDistance () const |
| void | initTPObstacles (std::vector< double > &TP_Obstacles) const |
| Resizes and populates the initial appropriate contents in a vector of tp-obstacles (collision-free ranges, in "pseudometers", un-normalized). More... | |
| void | initTPObstacleSingle (uint16_t k, double &TP_Obstacle_k) const |
| double | getScorePriority () const |
| When used in path planning, a multiplying factor (default=1.0) for the scores for this PTG. More... | |
| void | setScorePriorty (double prior) |
| unsigned | getClearanceStepCount () const |
| void | setClearanceStepCount (const unsigned res) |
| unsigned | getClearanceDecimatedPaths () const |
| void | setClearanceDecimatedPaths (const unsigned num) |
| virtual void | renderPathAsSimpleLine (const uint16_t k, mrpt::opengl::CSetOfLines &gl_obj, const double decimate_distance=0.1, const double max_path_distance=-1.0) const |
| Returns the representation of one trajectory of this PTG as a 3D OpenGL object (a simple curved line). More... | |
| bool | debugDumpInFiles (const std::string &ptg_name) const |
Dump PTG trajectories in four text files: . More... | |
| virtual void | loadFromConfigFile (const mrpt::utils::CConfigFileBase &cfg, const std::string &sSection) MRPT_OVERRIDE |
| Parameters accepted by this base class: More... | |
| virtual void | saveToConfigFile (mrpt::utils::CConfigFileBase &cfg, const std::string &sSection) const MRPT_OVERRIDE |
| This method saves the options to a ".ini"-like file or memory-stored string list. More... | |
| virtual void | add_robotShape_to_setOfLines (mrpt::opengl::CSetOfLines &gl_shape, const mrpt::poses::CPose2D &origin=mrpt::poses::CPose2D()) const =0 |
| Auxiliary function for rendering. More... | |
| void | initClearanceDiagram (ClearanceDiagram &cd) const |
| Must be called to resize a CD to its correct size, before calling updateClearance() More... | |
| void | updateClearance (const double ox, const double oy, ClearanceDiagram &cd) const |
| Updates the clearance diagram given one (ox,oy) obstacle point, in coordinates relative to the PTG path origin. More... | |
| void | updateClearancePost (ClearanceDiagram &cd, const std::vector< double > &TP_obstacles) const |
| virtual void | evalClearanceSingleObstacle (const double ox, const double oy, const uint16_t k, ClearanceDiagram::dist2clearance_t &inout_realdist2clearance, bool treat_as_obstacle=true) const |
Evals the robot clearance for each robot pose along path k, for the real distances in the key of the map<>, then keep in the map value the minimum of its current stored clearance, or the computed clearance. More... | |
| virtual mxArray * | writeToMatlab () const |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class. More... | |
| virtual CObject * | duplicate () const =0 |
| Returns a copy of the object, indepently of its class. More... | |
| CObject * | clone () const |
| Cloning interface for smart pointers. More... | |
| void | loadFromConfigFileName (const std::string &config_file, const std::string §ion) |
| Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file. More... | |
| void | saveToConfigFileName (const std::string &config_file, const std::string §ion) const |
| Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file. More... | |
| void | dumpToConsole () const |
| Just like dumpToTextStream() but sending the text to the console (std::cout) More... | |
| virtual void | dumpToTextStream (mrpt::utils::CStream &out) const |
| This method should clearly display all the contents of the structure in textual form, sending it to a CStream. More... | |
RTTI classes and functions | |
| mrpt::utils::CObjectPtr | duplicateGetSmartPtr () const |
| Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer). More... | |
Static Public Member Functions | |
| static CParameterizedTrajectoryGenerator * | CreatePTG (const std::string &ptgClassName, const mrpt::utils::CConfigFileBase &cfg, const std::string &sSection, const std::string &sKeyPrefix) |
| The class factory for creating a PTG from a list of parameters in a section of a given config file (physical file or in memory). More... | |
| static double | index2alpha (uint16_t k, const unsigned int num_paths) |
| static uint16_t | alpha2index (double alpha, const unsigned int num_paths) |
Static Public Attributes | |
| static std::string | OUTPUT_DEBUG_PATH_PREFIX = "./reactivenav.logs" |
| The path used as defaul output in, for example, debugDumpInFiles. (Default="./reactivenav.logs/") More... | |
| static PTG_collision_behavior_t | COLLISION_BEHAVIOR = mrpt::nav::COLL_BEH_BACK_AWAY |
| Defines the behavior when there is an obstacle inside the robot shape right at the beginning of a PTG trajectory. More... | |
| static const mrpt::utils::TRuntimeClassId | classCObject |
RTTI stuff <br> | |
| static const mrpt::utils::TRuntimeClassId | classCSerializable |
Protected Member Functions | |
| void | internal_TPObsDistancePostprocess (const double ox, const double oy, const double new_tp_obs_dist, double &inout_tp_obs) const |
| To be called by implementors of updateTPObstacle() and updateTPObstacleSingle() to honor the user settings regarding COLLISION_BEHAVIOR. More... | |
| virtual void | internal_readFromStream (mrpt::utils::CStream &in) |
| virtual void | internal_writeToStream (mrpt::utils::CStream &out) const |
| virtual void | writeToStream (mrpt::utils::CStream &out, int *getVersion) const =0 |
| Introduces a pure virtual method responsible for writing to a CStream. More... | |
| virtual void | readFromStream (mrpt::utils::CStream &in, int version)=0 |
| Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori. More... | |
Static Protected Member Functions | |
| static void | dumpVar_int (CStream &out, const char *varName, int v) |
| Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR. More... | |
| static void | dumpVar_float (CStream &out, const char *varName, float v) |
| static void | dumpVar_double (CStream &out, const char *varName, double v) |
| static void | dumpVar_bool (CStream &out, const char *varName, bool v) |
| static void | dumpVar_string (CStream &out, const char *varName, const std::string &v) |
Protected Attributes | |
| double | refDistance |
| uint16_t | m_alphaValuesCount |
| The number of discrete values for "alpha" between -PI and +PI. More... | |
| double | m_score_priority |
| uint16_t | m_clearance_num_points |
| Number of steps for the piecewise-constant approximation of clearance from TPS distances [0,1] (Default=5) More... | |
| uint16_t | m_clearance_decimated_paths |
| Number of paths for the decimated paths analysis of clearance. More... | |
| TNavDynamicState | m_nav_dyn_state |
| Updated before each nav step by. More... | |
| uint16_t | m_nav_dyn_state_target_k |
| Update in updateNavDynamicState(), contains the path index (k) for the target. More... | |
| bool | m_is_initialized |
Static Protected Attributes | |
| static const uint16_t | INVALID_PTG_PATH_INDEX = static_cast<uint16_t>(-1) |
RTTI stuff <br> | |
| typedef CParameterizedTrajectoryGeneratorPtr | Ptr |
| typedef CParameterizedTrajectoryGeneratorPtr | ConstPtr |
| static const mrpt::utils::TRuntimeClassId | classCParameterizedTrajectoryGenerator |
| class | mrpt::utils::CStream |
| static const mrpt::utils::TRuntimeClassId * | _GetBaseClass () |
| virtual const mrpt::utils::TRuntimeClassId * | GetRuntimeClass () const |
| Returns information about the class of an object in runtime. More... | |
Virtual interface of each PTG implementation | |
| virtual std::string | getDescription () const =0 |
| Gets a short textual description of the PTG and its parameters. More... | |
| virtual bool | inverseMap_WS2TP (double x, double y, int &out_k, double &out_normalized_d, double tolerance_dist=0.10) const =0 |
| Computes the closest (alpha,d) TP coordinates of the trajectory point closest to the Workspace (WS) Cartesian coordinates (x,y), relative to the current robot frame. More... | |
| virtual bool | PTG_IsIntoDomain (double x, double y) const |
| Returns the same than inverseMap_WS2TP() but without any additional cost. More... | |
| virtual bool | isBijectiveAt (uint16_t k, uint32_t step) const |
| Returns true if a given TP-Space point maps to a unique point in Workspace, and viceversa. More... | |
| virtual mrpt::kinematics::CVehicleVelCmdPtr | directionToMotionCommand (uint16_t k) const =0 |
| Converts a discretized "alpha" value into a feasible motion command or action. More... | |
| virtual mrpt::kinematics::CVehicleVelCmdPtr | getSupportedKinematicVelocityCommand () const =0 |
| Returns an empty kinematic velocity command object of the type supported by this PTG. More... | |
| virtual void | setRefDistance (const double refDist) |
| virtual size_t | getPathStepCount (uint16_t k) const =0 |
Access path k ([0,N-1]=>[-pi,pi] in alpha): number of discrete "steps" along the trajectory. More... | |
| virtual void | getPathPose (uint16_t k, uint32_t step, mrpt::math::TPose2D &p) const =0 |
Access path k ([0,N-1]=>[-pi,pi] in alpha): pose of the vehicle at discrete step step. More... | |
| virtual double | getPathDist (uint16_t k, uint32_t step) const =0 |
Access path k ([0,N-1]=>[-pi,pi] in alpha): traversed distance at discrete step step. More... | |
| virtual double | getPathStepDuration () const =0 |
| Returns the duration (in seconds) of each "step". More... | |
| virtual double | getMaxLinVel () const =0 |
| Returns the maximum linear velocity expected from this PTG [m/s]. More... | |
| virtual double | getMaxAngVel () const =0 |
| Returns the maximum angular velocity expected from this PTG [rad/s]. More... | |
| virtual bool | getPathStepForDist (uint16_t k, double dist, uint32_t &out_step) const =0 |
Access path k ([0,N-1]=>[-pi,pi] in alpha): largest step count for which the traversed distance is < dist More... | |
| virtual void | updateTPObstacle (double ox, double oy, std::vector< double > &tp_obstacles) const =0 |
| Updates the radial map of closest TP-Obstacles given a single obstacle point at (ox,oy) More... | |
| virtual void | updateTPObstacleSingle (double ox, double oy, uint16_t k, double &tp_obstacle_k) const =0 |
Like updateTPObstacle() but for one direction only (k) in TP-Space. More... | |
| virtual void | loadDefaultParams () |
| Loads a set of default parameters into the PTG. More... | |
| virtual bool | supportVelCmdNOP () const |
| Returns true if it is possible to stop sending velocity commands to the robot and, still, the robot controller will be able to keep following the last sent trajectory ("NOP" velocity commands). More... | |
| virtual bool | supportSpeedAtTarget () const |
| Returns true if this PTG takes into account the desired velocity at target. More... | |
| virtual double | maxTimeInVelCmdNOP (int path_k) const |
| Only for PTGs supporting supportVelCmdNOP(): this is the maximum time (in seconds) for which the path can be followed without re-issuing a new velcmd. More... | |
| virtual double | getActualUnloopedPathLength (uint16_t k) const |
| Returns the actual distance (in meters) of the path, discounting possible circular loops of the path (e.g. More... | |
| virtual double | evalPathRelativePriority (uint16_t k, double target_distance) const |
| Query the PTG for the relative priority factor (0,1) of this PTG, in comparison to others, if the k-th path is to be selected. More... | |
| virtual double | getMaxRobotRadius () const =0 |
| Returns an approximation of the robot radius. More... | |
| virtual bool | isPointInsideRobotShape (const double x, const double y) const =0 |
| Returns true if the point lies within the robot shape. More... | |
| virtual double | evalClearanceToRobotShape (const double ox, const double oy) const =0 |
| Evals the clearance from an obstacle (ox,oy) in coordinates relative to the robot center. More... | |
| virtual void | internal_initialize (const std::string &cacheFilename=std::string(), const bool verbose=true)=0 |
| Must be called after setting all PTG parameters and before requesting converting obstacles to TP-Space, inverseMap_WS2TP(), etc. More... | |
| virtual void | internal_deinitialize ()=0 |
| This must be called to de-initialize the PTG if some parameter is to be changed. More... | |
| virtual void | onNewNavDynamicState ()=0 |
Invoked when m_nav_dyn_state has changed; gives the PTG the opportunity to react and parameterize paths depending on the instantaneous conditions. More... | |
Member Typedef Documentation
◆ ConstPtr
| typedef CParameterizedTrajectoryGeneratorPtr mrpt::nav::CParameterizedTrajectoryGenerator::ConstPtr |
Definition at line 64 of file CParameterizedTrajectoryGenerator.h.
◆ Ptr
| typedef CParameterizedTrajectoryGeneratorPtr mrpt::nav::CParameterizedTrajectoryGenerator::Ptr |
Definition at line 64 of file CParameterizedTrajectoryGenerator.h.
Constructor & Destructor Documentation
◆ CParameterizedTrajectoryGenerator()
| CParameterizedTrajectoryGenerator::CParameterizedTrajectoryGenerator | ( | ) |
Default ctor. Must call loadFromConfigFile() before initialization.
Definition at line 26 of file CParameterizedTrajectoryGenerator.cpp.
◆ ~CParameterizedTrajectoryGenerator()
|
inlinevirtual |
Definition at line 67 of file CParameterizedTrajectoryGenerator.h.
Member Function Documentation
◆ _GetBaseClass()
|
staticprotected |
◆ add_robotShape_to_setOfLines()
|
pure virtual |
Auxiliary function for rendering.
Implemented in mrpt::nav::CPTG_RobotShape_Circular, and mrpt::nav::CPTG_RobotShape_Polygonal.
◆ alpha2index() [1/2]
| uint16_t CParameterizedTrajectoryGenerator::alpha2index | ( | double | alpha | ) | const |
Discrete index value for the corresponding alpha value.
- See also
- index2alpha
Definition at line 164 of file CParameterizedTrajectoryGenerator.cpp.
References m_alphaValuesCount.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CHolonomicFullEval::evalSingleTarget(), mrpt::nav::CAbstractPTGBasedReactive::generate_vel_cmd(), mrpt::nav::CPTG_Holo_Blend::inverseMap_WS2TP(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and mrpt::nav::ClearanceDiagram::renderAs3DObject().
◆ alpha2index() [2/2]
|
static |
Definition at line 155 of file CParameterizedTrajectoryGenerator.cpp.
References M_PI, mrpt::utils::round(), and mrpt::math::wrapToPi().
◆ clone()
|
inlineinherited |
◆ CreatePTG()
|
static |
The class factory for creating a PTG from a list of parameters in a section of a given config file (physical file or in memory).
Possible parameters are:
- Those explained in CParameterizedTrajectoryGenerator::loadFromConfigFile()
- Those explained in the specific PTG being created (see list of derived classes)
ptgClassName can be any PTG class name which has been registered as any other mrpt::utils::CSerializable class.
- Exceptions
-
std::logic_error On invalid or missing parameters.
Definition at line 21 of file CParameterizedTrajectoryGenerator_factory.cpp.
References mrpt::utils::CConfigFilePrefixer::bind(), mrpt::utils::TRuntimeClassId::createObject(), mrpt::utils::findRegisteredClass(), loadFromConfigFile(), MRPT_END, MRPT_START, mrpt::utils::registerAllPendingClasses(), mrpt::utils::CConfigFilePrefixer::setPrefixes(), THROW_EXCEPTION_FMT, and mrpt::system::trim().
Referenced by mrpt::nav::PlannerTPS_VirtualBase::internal_loadConfig_PTG(), mrpt::nav::CReactiveNavigationSystem::loadConfigFile(), and mrpt::nav::CReactiveNavigationSystem3D::loadConfigFile().
◆ debugDumpInFiles()
| bool CParameterizedTrajectoryGenerator::debugDumpInFiles | ( | const std::string & | ptg_name | ) | const |
Dump PTG trajectories in four text files: .
/reactivenav.logs/PTGs/PTGi_{x,y,phi,d}.txt Text files are loadable from MATLAB/Octave, and can be visualized with the script [MRPT_DIR]/scripts/viewPTG.m
- Note
- The directory "./reactivenav.logs/PTGs" will be created if doesn't exist.
- Returns
- false on any error writing to disk.
- See also
- OUTPUT_DEBUG_PATH_PREFIX
Definition at line 222 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::system::createDirectory(), mrpt::format(), getAlphaValuesCount(), getPathDist(), getPathPose(), getPathStepCount(), min, and OUTPUT_DEBUG_PATH_PREFIX.
◆ deinitialize()
| void CParameterizedTrajectoryGenerator::deinitialize | ( | ) |
This must be called to de-initialize the PTG if some parameter is to be changed.
After changing it, call initialize again
Definition at line 329 of file CParameterizedTrajectoryGenerator.cpp.
References internal_deinitialize(), and m_is_initialized.
Referenced by internal_readFromStream().
◆ directionToMotionCommand()
|
pure virtual |
Converts a discretized "alpha" value into a feasible motion command or action.
See derived classes for the meaning of these actions
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), and mrpt::nav::CAbstractPTGBasedReactive::generate_vel_cmd().
◆ dumpToConsole()
|
inherited |
Just like dumpToTextStream() but sending the text to the console (std::cout)
Definition at line 47 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::dumpToTextStream(), and loadable_opts_my_cout.
Referenced by mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), mrpt::hmtslam::CHMTSLAM::loadOptions(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::printParams().
◆ dumpToTextStream()
|
virtualinherited |
This method should clearly display all the contents of the structure in textual form, sending it to a CStream.
The default implementation in this base class relies on saveToConfigFile() to generate a plain text representation of all the parameters.
Reimplemented in mrpt::vision::TMultiResDescOptions, mrpt::vision::TMultiResDescMatchOptions, mrpt::vision::TMatchingOptions, mrpt::vision::TStereoSystemParams, mrpt::vision::CFeatureExtraction::TOptions, mrpt::vision::CCamModel, mrpt::maps::CLandmarksMap::TLikelihoodOptions, mrpt::maps::CLandmarksMap::TInsertionOptions, mrpt::slam::TKLDParams, mrpt::slam::CRangeBearingKFSLAM2D::TOptions, mrpt::slam::CRangeBearingKFSLAM::TOptions, mrpt::slam::CMetricMapBuilderRBPF::TConstructionOptions, mrpt::slam::CMetricMapBuilderICP::TConfigParams, mrpt::slam::CIncrementalMapPartitioner::TOptions, mrpt::slam::CICP::TConfigParams, mrpt::slam::CGridMapAligner::TConfigParams, mrpt::maps::CMultiMetricMapPDF::TPredictionParams, mrpt::maps::TSetOfMetricMapInitializers, mrpt::maps::TMetricMapInitializer, mrpt::maps::TMapGenericParams, mrpt::maps::CWirelessPowerGridMap2D::TInsertionOptions, mrpt::maps::CReflectivityGridMap2D::TInsertionOptions, mrpt::maps::CPointsMap::TLikelihoodOptions, mrpt::maps::CPointsMap::TInsertionOptions, mrpt::maps::COctoMapBase< octree_t, octree_node_t >::TLikelihoodOptions, mrpt::maps::COctoMapBase< octree_t, octree_node_t >::TInsertionOptions, mrpt::maps::COccupancyGridMap2D::TLikelihoodOptions, mrpt::maps::COccupancyGridMap2D::TInsertionOptions, mrpt::maps::CHeightGridMap2D_MRF::TInsertionOptions, mrpt::maps::CHeightGridMap2D::TInsertionOptions, mrpt::maps::CGasConcentrationGridMap2D::TInsertionOptions, mrpt::maps::CColouredPointsMap::TColourOptions, mrpt::maps::CBeaconMap::TInsertionOptions, mrpt::maps::CBeaconMap::TLikelihoodOptions, mrpt::hmtslam::CTopLCDetector_GridMatching::TOptions, mrpt::hmtslam::CTopLCDetector_FabMap::TOptions, mrpt::hmtslam::CHMTSLAM::TOptions, mrpt::bayes::TKF_options, mrpt::bayes::CParticleFilter::TParticleFilterOptions, mrpt::maps::CRandomFieldGridMap3D::TInsertionOptions, mrpt::graphslam::deciders::CICPCriteriaNRD< GRAPH_T >::TParams, mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::TParams, mrpt::graphslam::TUncertaintyPath< GRAPH_T >, mrpt::graphslam::TSlidingWindow, mrpt::graphslam::deciders::CRangeScanOps< GRAPH_T >::TParams, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::GraphVisualizationParams, mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::OptimizationParams, mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::TLoopClosureParams, mrpt::graphslam::deciders::CLoopCloserERD< GRAPH_T >::TLaserParams, and mrpt::graphslam::deciders::CICPCriteriaERD< GRAPH_T >::TParams.
Definition at line 80 of file CLoadableOptions.cpp.
References mrpt::utils::CConfigFileMemory::getContent(), mrpt::utils::CStream::printf(), and mrpt::utils::CLoadableOptions::saveToConfigFile().
Referenced by mrpt::utils::CLoadableOptions::dumpToConsole().
◆ dumpVar_bool()
|
staticprotectedinherited |
Definition at line 67 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_double()
|
staticprotectedinherited |
Definition at line 62 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_float()
|
staticprotectedinherited |
Definition at line 57 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_int()
|
staticprotectedinherited |
Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR.
Definition at line 52 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_string()
|
staticprotectedinherited |
Definition at line 72 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ duplicate()
|
pure virtualinherited |
Returns a copy of the object, indepently of its class.
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::opengl::C3DSScene, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CMultiObjMotionOpt_Scalarization, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::gui::CDisplayWindowPlots, mrpt::gui::CDisplayWindow3D, mrpt::gui::CDisplayWindow, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::utils::TStereoCamera, mrpt::utils::TCamera, mrpt::utils::CTypeSelector, mrpt::utils::CStringList, mrpt::utils::CSimpleDatabase, mrpt::utils::CSimpleDatabaseTable, mrpt::utils::CPropertiesValuesList, mrpt::utils::CMHPropertiesValuesList, mrpt::utils::CMemoryChunk, mrpt::utils::CImage, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::TSimple3DPoint, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, and mrpt::math::CMatrix.
Referenced by mrpt::poses::CPoseRandomSampler::CPoseRandomSampler(), mrpt::obs::CActionCollection::insert(), mrpt::maps::CSimpleMap::insert(), mrpt::poses::CPoseRandomSampler::operator=(), and mrpt::poses::CPoseRandomSampler::setPosePDF().
◆ duplicateGetSmartPtr()
|
inlineinherited |
Returns a copy of the object, indepently of its class, as a smart pointer (the newly created object will exist as long as any copy of this smart pointer).
Definition at line 162 of file CObject.h.
References mrpt::utils::CObjectPtr.
Referenced by mrpt::obs::CRawlog::addActions(), mrpt::slam::CIncrementalMapPartitioner::addMapFrame(), and mrpt::obs::CRawlog::addObservations().
◆ evalClearanceSingleObstacle()
|
virtual |
Evals the robot clearance for each robot pose along path k, for the real distances in the key of the map<>, then keep in the map value the minimum of its current stored clearance, or the computed clearance.
In case of collision, clearance is zero.
- Parameters
-
treat_as_obstacle true: normal use for obstacles; false: compute shortest distances to a target point (no collision)
Definition at line 411 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::math::angDistance(), ASSERT_, mrpt::utils::DEG2RAD(), evalClearanceToRobotShape(), getPathPose(), getPathStepCount(), index2alpha(), mrpt::math::TPose2D::inverseComposePoint(), mrpt::utils::keep_min(), mrpt::math::TPoint2D::norm(), refDistance, mrpt::utils::round(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), and updateClearance().
◆ evalClearanceToRobotShape()
|
pure virtual |
Evals the clearance from an obstacle (ox,oy) in coordinates relative to the robot center.
Zero or negative means collision.
Implemented in mrpt::nav::CPTG_RobotShape_Circular, and mrpt::nav::CPTG_RobotShape_Polygonal.
Referenced by evalClearanceSingleObstacle().
◆ evalPathRelativePriority()
|
inlinevirtual |
Query the PTG for the relative priority factor (0,1) of this PTG, in comparison to others, if the k-th path is to be selected.
Definition at line 210 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores().
◆ getActualUnloopedPathLength()
|
inlinevirtual |
Returns the actual distance (in meters) of the path, discounting possible circular loops of the path (e.g.
if it comes back to the origin). Default: refDistance
Definition at line 207 of file CParameterizedTrajectoryGenerator.h.
◆ getAlphaValuesCount()
|
inline |
Get the number of different, discrete paths in this family.
Definition at line 236 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), debugDumpInFiles(), and mrpt::nav::CPTG_DiffDrive_CollisionGridBased::internal_initialize().
◆ getClearanceDecimatedPaths()
|
inline |
Definition at line 261 of file CParameterizedTrajectoryGenerator.h.
◆ getClearanceStepCount()
|
inline |
Definition at line 258 of file CParameterizedTrajectoryGenerator.h.
◆ getCurrentNavDynamicState()
|
inline |
Definition at line 224 of file CParameterizedTrajectoryGenerator.h.
◆ getDescription()
|
pure virtual |
Gets a short textual description of the PTG and its parameters.
Implemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, and mrpt::nav::CPTG_DiffDrive_alpha.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), initialize(), and TEST().
◆ getMaxAngVel()
|
pure virtual |
Returns the maximum angular velocity expected from this PTG [rad/s].
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
◆ getMaxLinVel()
|
pure virtual |
Returns the maximum linear velocity expected from this PTG [m/s].
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
◆ getMaxRobotRadius()
|
pure virtual |
Returns an approximation of the robot radius.
Implemented in mrpt::nav::CPTG_RobotShape_Circular, and mrpt::nav::CPTG_RobotShape_Polygonal.
Referenced by internal_TPObsDistancePostprocess().
◆ getPathCount()
|
inline |
Get the number of different, discrete paths in this family.
Definition at line 238 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::impl_waypoint_is_reachable(), and TEST().
◆ getPathDist()
|
pure virtual |
Access path k ([0,N-1]=>[-pi,pi] in alpha): traversed distance at discrete step step.
- Returns
- Distance in pseudometers (real distance, NOT normalized to [0,1] for [0,refDist])
- See also
- getPathStepCount(), getAlphaValuesCount()
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), debugDumpInFiles(), initClearanceDiagram(), initTPObstacleSingle(), renderPathAsSimpleLine(), and TEST().
◆ getPathPose()
|
pure virtual |
Access path k ([0,N-1]=>[-pi,pi] in alpha): pose of the vehicle at discrete step step.
- See also
- getPathStepCount(), getAlphaValuesCount()
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), debugDumpInFiles(), evalClearanceSingleObstacle(), renderPathAsSimpleLine(), and TEST().
◆ getPathStepCount()
|
pure virtual |
Access path k ([0,N-1]=>[-pi,pi] in alpha): number of discrete "steps" along the trajectory.
May be actual steps from a numerical integration or an arbitrary small length for analytical PTGs.
- See also
- getAlphaValuesCount()
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by debugDumpInFiles(), evalClearanceSingleObstacle(), initClearanceDiagram(), initTPObstacleSingle(), and renderPathAsSimpleLine().
◆ getPathStepDuration()
|
pure virtual |
Returns the duration (in seconds) of each "step".
- See also
- getPathStepCount()
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores().
◆ getPathStepForDist()
|
pure virtual |
Access path k ([0,N-1]=>[-pi,pi] in alpha): largest step count for which the traversed distance is < dist
- Parameters
-
[in] dist Distance in pseudometers (real distance, NOT normalized to [0,1] for [0,refDist])
- Returns
- false if no step fulfills the condition for the given trajectory
k(e.g. out of reference distance). Note that, anyway, the maximum distance (closest point) is returned inout_step.
- See also
- getPathStepCount(), getAlphaValuesCount()
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), and TEST().
◆ getRefDistance()
|
inline |
Definition at line 248 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), and TEST().
◆ GetRuntimeClass()
|
virtual |
Returns information about the class of an object in runtime.
Reimplemented from mrpt::utils::CSerializable.
Reimplemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, and mrpt::nav::CPTG_DiffDrive_alpha.
◆ getScorePriority()
|
inline |
When used in path planning, a multiplying factor (default=1.0) for the scores for this PTG.
Assign values <1 to PTGs with low priority.
Definition at line 255 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores().
◆ getSupportedKinematicVelocityCommand()
|
pure virtual |
Returns an empty kinematic velocity command object of the type supported by this PTG.
Can be queried to determine the expected kinematic interface of the PTG.
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::generate_vel_cmd().
◆ index2alpha() [1/2]
| double CParameterizedTrajectoryGenerator::index2alpha | ( | uint16_t | k | ) | const |
Alpha value for the discrete corresponding value.
- See also
- alpha2index
Definition at line 150 of file CParameterizedTrajectoryGenerator.cpp.
References m_alphaValuesCount.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::directionToMotionCommand(), mrpt::nav::CPTG_Holo_Blend::directionToMotionCommand(), evalClearanceSingleObstacle(), mrpt::nav::CPTG_Holo_Blend::getPathDist(), mrpt::nav::CPTG_Holo_Blend::getPathPose(), mrpt::nav::CPTG_Holo_Blend::getPathStepForDist(), mrpt::nav::CHolonomicFullEval::navigate(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::simulateTrajectories(), and mrpt::nav::CPTG_Holo_Blend::updateTPObstacleSingle().
◆ index2alpha() [2/2]
|
static |
Definition at line 143 of file CParameterizedTrajectoryGenerator.cpp.
References ASSERT_BELOW_, and M_PI.
◆ initClearanceDiagram()
| void mrpt::nav::CParameterizedTrajectoryGenerator::initClearanceDiagram | ( | ClearanceDiagram & | cd | ) | const |
Must be called to resize a CD to its correct size, before calling updateClearance()
Definition at line 373 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::nav::ClearanceDiagram::decimated_k_to_real_k(), mrpt::nav::ClearanceDiagram::get_path_clearance_decimated(), getPathDist(), getPathStepCount(), m_alphaValuesCount, m_clearance_decimated_paths, m_clearance_num_points, mrpt::nav::ClearanceDiagram::resize(), and mrpt::utils::round().
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate().
◆ initialize()
| void CParameterizedTrajectoryGenerator::initialize | ( | const std::string & | cacheFilename = std::string(), |
| const bool | verbose = true |
||
| ) |
Must be called after setting all PTG parameters and before requesting converting obstacles to TP-Space, inverseMap_WS2TP(), etc.
Definition at line 317 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::system::fileNameStripInvalidChars(), getDescription(), internal_initialize(), and m_is_initialized.
◆ initTPObstacles()
| void CParameterizedTrajectoryGenerator::initTPObstacles | ( | std::vector< double > & | TP_Obstacles | ) | const |
Resizes and populates the initial appropriate contents in a vector of tp-obstacles (collision-free ranges, in "pseudometers", un-normalized).
- See also
- updateTPObstacle()
Definition at line 204 of file CParameterizedTrajectoryGenerator.cpp.
References initTPObstacleSingle(), and m_alphaValuesCount.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::PlannerTPS_VirtualBase::spaceTransformer(), and TEST().
◆ initTPObstacleSingle()
| void CParameterizedTrajectoryGenerator::initTPObstacleSingle | ( | uint16_t | k, |
| double & | TP_Obstacle_k | ||
| ) | const |
Definition at line 210 of file CParameterizedTrajectoryGenerator.cpp.
References getPathDist(), getPathStepCount(), INVALID_PTG_PATH_INDEX, m_nav_dyn_state_target_k, min, and refDistance.
Referenced by initTPObstacles(), and mrpt::nav::PlannerTPS_VirtualBase::spaceTransformerOneDirectionOnly().
◆ internal_deinitialize()
|
protectedpure virtual |
This must be called to de-initialize the PTG if some parameter is to be changed.
After changing it, call initialize again
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by deinitialize().
◆ internal_initialize()
|
protectedpure virtual |
Must be called after setting all PTG parameters and before requesting converting obstacles to TP-Space, inverseMap_WS2TP(), etc.
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by initialize().
◆ internal_readFromStream()
|
protectedvirtual |
Reimplemented in mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Definition at line 103 of file CParameterizedTrajectoryGenerator.cpp.
References deinitialize(), m_alphaValuesCount, m_clearance_decimated_paths, m_clearance_num_points, m_score_priority, MRPT_THROW_UNKNOWN_SERIALIZATION_VERSION, refDistance, and version.
Referenced by mrpt::nav::CPTG_DiffDrive_CollisionGridBased::internal_readFromStream(), and mrpt::nav::CPTG_Holo_Blend::readFromStream().
◆ internal_TPObsDistancePostprocess()
|
protected |
To be called by implementors of updateTPObstacle() and updateTPObstacleSingle() to honor the user settings regarding COLLISION_BEHAVIOR.
- Parameters
-
new_tp_obs_dist The newly determiend collision-free ranges, in "pseudometers", un-normalized, for some "k" direction. inout_tp_obs The target where to store the new TP-Obs distance, if it fulfills the criteria determined by the collision behavior.
Definition at line 336 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::nav::COLL_BEH_BACK_AWAY, mrpt::nav::COLL_BEH_STOP, COLLISION_BEHAVIOR, getMaxRobotRadius(), isPointInsideRobotShape(), mrpt::utils::keep_min(), and THROW_EXCEPTION.
Referenced by mrpt::nav::CPTG_DiffDrive_CollisionGridBased::updateTPObstacle(), and mrpt::nav::CPTG_DiffDrive_CollisionGridBased::updateTPObstacleSingle().
◆ internal_writeToStream()
|
protectedvirtual |
Reimplemented in mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Definition at line 134 of file CParameterizedTrajectoryGenerator.cpp.
References m_alphaValuesCount, m_clearance_decimated_paths, m_clearance_num_points, m_score_priority, refDistance, and version.
Referenced by mrpt::nav::CPTG_DiffDrive_CollisionGridBased::internal_writeToStream(), and mrpt::nav::CPTG_Holo_Blend::writeToStream().
◆ inverseMap_WS2TP()
|
pure virtual |
Computes the closest (alpha,d) TP coordinates of the trajectory point closest to the Workspace (WS) Cartesian coordinates (x,y), relative to the current robot frame.
- Parameters
-
[in] x X coordinate of the query point, relative to the robot frame. [in] y Y coordinate of the query point, relative to the robot frame. [out] out_k Trajectory parameter index (discretized alpha value, 0-based index). [out] out_d Trajectory distance, normalized such that D_max becomes 1.
- Returns
- true if the distance between (x,y) and the actual trajectory point is below the given tolerance (in meters).
Implemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, and mrpt::nav::CPTG_DiffDrive_C.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CAbstractPTGBasedReactive::impl_waypoint_is_reachable(), TEST(), and updateNavDynamicState().
◆ isBijectiveAt()
|
inlinevirtual |
Returns true if a given TP-Space point maps to a unique point in Workspace, and viceversa.
Default implementation returns true.
Definition at line 112 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores().
◆ isInitialized()
| bool CParameterizedTrajectoryGenerator::isInitialized | ( | ) | const |
Returns true if initialize() has been called and there was no errors, so the PTG is ready to be queried for paths, obstacles, etc.
Definition at line 281 of file CParameterizedTrajectoryGenerator.cpp.
References m_is_initialized.
◆ isPointInsideRobotShape()
|
pure virtual |
Returns true if the point lies within the robot shape.
Implemented in mrpt::nav::CPTG_RobotShape_Circular, and mrpt::nav::CPTG_RobotShape_Polygonal.
Referenced by internal_TPObsDistancePostprocess().
◆ loadDefaultParams()
|
virtual |
Loads a set of default parameters into the PTG.
Users normally will call loadFromConfigFile() instead, this method is provided exclusively for the PTG-configurator tool.
Reimplemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CPTG_RobotShape_Circular, and mrpt::nav::CPTG_RobotShape_Polygonal.
Definition at line 37 of file CParameterizedTrajectoryGenerator.cpp.
References m_alphaValuesCount, m_clearance_decimated_paths, m_clearance_num_points, m_score_priority, and refDistance.
Referenced by mrpt::nav::CPTG_DiffDrive_CollisionGridBased::loadDefaultParams(), and mrpt::nav::CPTG_Holo_Blend::loadDefaultParams().
◆ loadFromConfigFile()
|
virtual |
Parameters accepted by this base class:
${sKeyPrefix}num_paths: The number of different paths in this family (number of discretealphavalues).${sKeyPrefix}ref_distance: The maximum distance in PTGs [meters]${sKeyPrefix}score_priority: When used in path planning, a multiplying factor (default=1.0) for the scores for this PTG. Assign values <1 to PTGs with low priority.
Implements mrpt::utils::CLoadableOptions.
Reimplemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, and mrpt::nav::CPTG_DiffDrive_alpha.
Definition at line 56 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::curVelLocal, mrpt::utils::keep_max(), m_alphaValuesCount, m_clearance_decimated_paths, m_clearance_num_points, m_nav_dyn_state, m_score_priority, MRPT_LOAD_CONFIG_VAR_NO_DEFAULT, MRPT_LOAD_HERE_CONFIG_VAR, MRPT_LOAD_HERE_CONFIG_VAR_DEGREES, MRPT_LOAD_HERE_CONFIG_VAR_NO_DEFAULT, mrpt::math::TTwist2D::omega, mrpt::math::TPose2D::phi, refDistance, mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::relTarget, mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::targetRelSpeed, mrpt::math::TTwist2D::vx, mrpt::math::TTwist2D::vy, mrpt::math::TPose2D::x, and mrpt::math::TPose2D::y.
Referenced by CreatePTG(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::loadFromConfigFile(), and mrpt::nav::CPTG_Holo_Blend::loadFromConfigFile().
◆ loadFromConfigFileName()
|
inherited |
Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file.
- See also
- loadFromConfigFile
Definition at line 23 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::loadFromConfigFile().
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::loadParams().
◆ maxTimeInVelCmdNOP()
|
virtual |
Only for PTGs supporting supportVelCmdNOP(): this is the maximum time (in seconds) for which the path can be followed without re-issuing a new velcmd.
Note that this is only an absolute maximum duration, navigation implementations will check for many other conditions. Default method in the base virtual class returns 0.
- Parameters
-
path_k Queried path kindex [0,N-1]
Reimplemented in mrpt::nav::CPTG_Holo_Blend.
Definition at line 50 of file CParameterizedTrajectoryGenerator.cpp.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), and mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().
◆ onNewNavDynamicState()
|
protectedpure virtual |
Invoked when m_nav_dyn_state has changed; gives the PTG the opportunity to react and parameterize paths depending on the instantaneous conditions.
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by updateNavDynamicState().
◆ PTG_IsIntoDomain()
|
inlinevirtual |
Returns the same than inverseMap_WS2TP() but without any additional cost.
The default implementation just calls inverseMap_WS2TP() and discards (k,d).
Reimplemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, and mrpt::nav::CPTG_DiffDrive_C.
Definition at line 106 of file CParameterizedTrajectoryGenerator.h.
◆ readFromStream()
|
protectedpure virtualinherited |
Introduces a pure virtual method responsible for loading from a CStream This can not be used directly be users, instead use "stream >> object;" for reading it from a stream or "stream >> object_ptr;" if the class is unknown apriori.
- Parameters
-
in The input binary stream where the object data must read from. version The version of the object stored in the stream: use this version number in your code to know how to read the incoming data.
- Exceptions
-
std::exception On any error, see CStream::ReadBuffer
- See also
- CStream
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::opengl::C3DSScene, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::utils::TStereoCamera, mrpt::utils::TCamera, mrpt::utils::CTypeSelector, mrpt::utils::CStringList, mrpt::utils::CSimpleDatabase, mrpt::utils::CSimpleDatabaseTable, mrpt::utils::CPropertiesValuesList, mrpt::utils::CMHPropertiesValuesList, mrpt::utils::CMemoryChunk, mrpt::utils::CImage, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::TSimple3DPoint, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, and mrpt::math::CMatrix.
◆ renderPathAsSimpleLine()
|
virtual |
Returns the representation of one trajectory of this PTG as a 3D OpenGL object (a simple curved line).
- Parameters
-
[in] k The 0-based index of the selected trajectory (discrete "alpha" parameter). [out] gl_obj Output object. [in] decimate_distance Minimum distance between path points (in meters). [in] max_path_distance If >=0, cut the path at this distance (in meters).
Definition at line 169 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::opengl::CSetOfLines::appendLine(), mrpt::opengl::CSetOfLines::appendLineStrip(), getPathDist(), getPathPose(), and getPathStepCount().
Referenced by mrpt::nav::PlannerTPS_VirtualBase::renderMoveTree().
◆ saveToConfigFile()
|
virtual |
This method saves the options to a ".ini"-like file or memory-stored string list.
- See also
- loadFromConfigFile, saveToConfigFileName
Reimplemented from mrpt::utils::CLoadableOptions.
Reimplemented in mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CPTG_RobotShape_Circular, and mrpt::nav::CPTG_RobotShape_Polygonal.
Definition at line 78 of file CParameterizedTrajectoryGenerator.cpp.
References mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::curVelLocal, m_alphaValuesCount, m_clearance_decimated_paths, m_clearance_num_points, m_nav_dyn_state, m_score_priority, MRPT_END, MRPT_START, mrpt::math::TTwist2D::omega, mrpt::math::TPose2D::phi, mrpt::utils::RAD2DEG(), refDistance, mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::relTarget, mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::targetRelSpeed, mrpt::math::TTwist2D::vx, mrpt::math::TTwist2D::vy, mrpt::utils::CConfigFileBase::write(), mrpt::math::TPose2D::x, and mrpt::math::TPose2D::y.
Referenced by mrpt::nav::CPTG_DiffDrive_CollisionGridBased::saveToConfigFile(), and mrpt::nav::CPTG_Holo_Blend::saveToConfigFile().
◆ saveToConfigFileName()
|
inherited |
Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file.
- See also
- saveToConfigFile, loadFromConfigFileName
Definition at line 39 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::saveToConfigFile().
◆ setClearanceDecimatedPaths()
|
inline |
Definition at line 262 of file CParameterizedTrajectoryGenerator.h.
◆ setClearanceStepCount()
|
inline |
Definition at line 259 of file CParameterizedTrajectoryGenerator.h.
◆ setRefDistance()
|
inlinevirtual |
Reimplemented in mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Definition at line 140 of file CParameterizedTrajectoryGenerator.h.
◆ setScorePriorty()
|
inline |
Definition at line 256 of file CParameterizedTrajectoryGenerator.h.
◆ supportSpeedAtTarget()
|
inlinevirtual |
Returns true if this PTG takes into account the desired velocity at target.
- See also
- updateNavDynamicState()
Definition at line 195 of file CParameterizedTrajectoryGenerator.h.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep(), and updateNavDynamicState().
◆ supportVelCmdNOP()
|
virtual |
Returns true if it is possible to stop sending velocity commands to the robot and, still, the robot controller will be able to keep following the last sent trajectory ("NOP" velocity commands).
Default implementation returns "false".
Reimplemented in mrpt::nav::CPTG_Holo_Blend.
Definition at line 46 of file CParameterizedTrajectoryGenerator.cpp.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate(), mrpt::nav::CAbstractPTGBasedReactive::calc_move_candidate_scores(), and mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().
◆ updateClearance()
| void CParameterizedTrajectoryGenerator::updateClearance | ( | const double | ox, |
| const double | oy, | ||
| ClearanceDiagram & | cd | ||
| ) | const |
Updates the clearance diagram given one (ox,oy) obstacle point, in coordinates relative to the PTG path origin.
- Parameters
-
[in,out] cd The clearance will be updated here.
- See also
- m_clearance_dist_resolution
Definition at line 392 of file CParameterizedTrajectoryGenerator.cpp.
References ASSERT_, mrpt::nav::ClearanceDiagram::decimated_k_to_real_k(), evalClearanceSingleObstacle(), mrpt::nav::ClearanceDiagram::get_actual_num_paths(), mrpt::nav::ClearanceDiagram::get_decimated_num_paths(), mrpt::nav::ClearanceDiagram::get_path_clearance_decimated(), m_alphaValuesCount, and m_clearance_num_points.
Referenced by mrpt::nav::CReactiveNavigationSystem::STEP3_WSpaceToTPSpace().
◆ updateClearancePost()
| void CParameterizedTrajectoryGenerator::updateClearancePost | ( | ClearanceDiagram & | cd, |
| const std::vector< double > & | TP_obstacles | ||
| ) | const |
Definition at line 406 of file CParameterizedTrajectoryGenerator.cpp.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::build_movement_candidate().
◆ updateNavDynamicState()
| void CParameterizedTrajectoryGenerator::updateNavDynamicState | ( | const TNavDynamicState & | newState, |
| const bool | force_update = false |
||
| ) |
To be invoked by the navigator before each navigation step, to let the PTG to react to changing dynamic conditions.
- See also
- onNewNavDynamicState(), m_nav_dyn_state
Definition at line 286 of file CParameterizedTrajectoryGenerator.cpp.
References ASSERT_, INVALID_PTG_PATH_INDEX, inverseMap_WS2TP(), m_alphaValuesCount, m_nav_dyn_state, m_nav_dyn_state_target_k, onNewNavDynamicState(), mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::relTarget, supportSpeedAtTarget(), mrpt::nav::CParameterizedTrajectoryGenerator::TNavDynamicState::targetRelSpeed, mrpt::math::TPose2D::x, and mrpt::math::TPose2D::y.
Referenced by mrpt::nav::CAbstractPTGBasedReactive::performNavigationStep().
◆ updateTPObstacle()
|
pure virtual |
Updates the radial map of closest TP-Obstacles given a single obstacle point at (ox,oy)
- Parameters
-
[in,out] tp_obstacles A vector of length getAlphaValuesCount(), initialized withinitTPObstacles()(collision-free ranges, in "pseudometers", un-normalized).[in] ox Obstacle point (X), relative coordinates wrt origin of the PTG. [in] oy Obstacle point (Y), relative coordinates wrt origin of the PTG.
- Note
- The length of tp_obstacles is not checked for efficiency since this method is potentially called thousands of times per navigation timestap, so it is left to the user responsibility to provide a valid buffer.
-
tp_obstaclesmust be initialized with initTPObstacle() before call.
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::spaceTransformer(), mrpt::nav::CReactiveNavigationSystem::STEP3_WSpaceToTPSpace(), and TEST().
◆ updateTPObstacleSingle()
|
pure virtual |
Like updateTPObstacle() but for one direction only (k) in TP-Space.
tp_obstacle_k must be initialized with initTPObstacleSingle() before call (collision-free ranges, in "pseudometers", un-normalized).
Implemented in mrpt::nav::CPTG_Holo_Blend, and mrpt::nav::CPTG_DiffDrive_CollisionGridBased.
Referenced by mrpt::nav::PlannerTPS_VirtualBase::spaceTransformerOneDirectionOnly().
◆ writeToMatlab()
|
inlinevirtualinherited |
Introduces a pure virtual method responsible for writing to a mxArray Matlab object, typically a MATLAB struct whose contents are documented in each derived class.
- Returns
- A new
mxArray(caller is responsible of memory freeing) or NULL is class does not support conversion to MATLAB.
Definition at line 79 of file CSerializable.h.
◆ writeToStream()
|
protectedpure virtualinherited |
Introduces a pure virtual method responsible for writing to a CStream.
This can not be used directly be users, instead use "stream << object;" for writing it to a stream.
- Parameters
-
out The output binary stream where object must be dumped. getVersion If NULL, the object must be dumped. If not, only the version of the object dump must be returned in this pointer. This enables the versioning of objects dumping and backward compatibility with previously stored data.
- Exceptions
-
std::exception On any error, see CStream::WriteBuffer
- See also
- CStream
Implemented in mrpt::vision::CFeature, mrpt::obs::CObservationVisualLandmarks, mrpt::maps::CLandmarksMap, mrpt::maps::CLandmark, mrpt::slam::CIncrementalMapPartitioner, mrpt::maps::CMultiMetricMapPDF, mrpt::maps::CRBPFParticleData, mrpt::maps::CMultiMetricMap, mrpt::pbmap::Plane, mrpt::pbmap::PbMap, mrpt::opengl::CVectorField3D, mrpt::opengl::CVectorField2D, mrpt::opengl::CTexturedPlane, mrpt::opengl::CText3D, mrpt::opengl::CText, mrpt::opengl::CSphere, mrpt::opengl::CSimpleLine, mrpt::opengl::CSetOfTriangles, mrpt::opengl::CSetOfTexturedTriangles, mrpt::opengl::CSetOfObjects, mrpt::opengl::CSetOfLines, mrpt::opengl::CPolyhedron, mrpt::opengl::CPointCloudColoured, mrpt::opengl::CPointCloud, mrpt::opengl::COpenGLViewport, mrpt::opengl::COpenGLStandardObject, mrpt::opengl::COpenGLScene, mrpt::opengl::COctoMapVoxels, mrpt::opengl::CMeshFast, mrpt::opengl::CMesh3D, mrpt::opengl::CMesh, mrpt::opengl::CGridPlaneXZ, mrpt::opengl::CGridPlaneXY, mrpt::opengl::CGeneralizedCylinder, mrpt::opengl::CFrustum, mrpt::opengl::CEllipsoidRangeBearing2D, mrpt::opengl::CEllipsoidInverseDepth3D, mrpt::opengl::CEllipsoidInverseDepth2D, mrpt::opengl::CEllipsoid, mrpt::opengl::CDisk, mrpt::opengl::CCylinder, mrpt::opengl::CColorBar, mrpt::opengl::CCamera, mrpt::opengl::CBox, mrpt::opengl::CAxis, mrpt::opengl::CAssimpModel, mrpt::opengl::CArrow, mrpt::opengl::C3DSScene, mrpt::obs::CSensoryFrame, mrpt::obs::CRawlog, mrpt::obs::CObservationWirelessPower, mrpt::obs::CObservationWindSensor, mrpt::obs::CObservationVelodyneScan, mrpt::obs::CObservationStereoImagesFeatures, mrpt::obs::CObservationStereoImages, mrpt::obs::CObservationSkeleton, mrpt::obs::CObservationRobotPose, mrpt::obs::CObservationRGBD360, mrpt::obs::CObservationRFID, mrpt::obs::CObservationReflectivity, mrpt::obs::CObservationRawDAQ, mrpt::obs::CObservationRange, mrpt::obs::CObservationOdometry, mrpt::obs::CObservationIMU, mrpt::obs::CObservationImage, mrpt::obs::CObservationGPS, mrpt::obs::CObservationGasSensors, mrpt::obs::CObservationComment, mrpt::obs::CObservationCANBusJ1939, mrpt::obs::CObservationBearingRange, mrpt::obs::CObservationBeaconRanges, mrpt::obs::CObservationBatteryState, mrpt::obs::CObservation6DFeatures, mrpt::obs::CObservation3DRangeScan, mrpt::obs::CObservation2DRangeScan, mrpt::obs::CActionRobotMovement3D, mrpt::obs::CActionRobotMovement2D, mrpt::obs::CActionCollection, mrpt::maps::TMapGenericParams, mrpt::maps::CSimpleMap, mrpt::nav::CPTG_Holo_Blend, mrpt::nav::CPTG_DiffDrive_CS, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CLogFileRecord, mrpt::nav::CHolonomicVFF, mrpt::nav::CLogFileRecord_VFF, mrpt::nav::CLogFileRecord_ND, mrpt::nav::CHolonomicND, mrpt::nav::CLogFileRecord_FullEval, mrpt::nav::CHolonomicFullEval, mrpt::opengl::CPlanarLaserScan, mrpt::opengl::CAngularObservationMesh, mrpt::maps::CWirelessPowerGridMap2D, mrpt::maps::CWeightedPointsMap, mrpt::maps::CSimplePointsMap, mrpt::maps::CReflectivityGridMap2D, mrpt::maps::CRandomFieldGridMap3D, mrpt::maps::COctoMap, mrpt::maps::COccupancyGridMap2D, mrpt::maps::CHeightGridMap2D_MRF, mrpt::maps::CHeightGridMap2D, mrpt::maps::CGasConcentrationGridMap2D, mrpt::maps::CColouredPointsMap, mrpt::maps::CColouredOctoMap, mrpt::maps::CBeaconMap, mrpt::maps::CBeacon, mrpt::kinematics::CVehicleVelCmd_Holo, mrpt::kinematics::CVehicleVelCmd_DiffDriven, mrpt::kinematics::CKinematicChain, mrpt::hmtslam::THypothesisIDSet, mrpt::hmtslam::CRobotPosesGraph, mrpt::hmtslam::CLocalMetricHypothesis, mrpt::hmtslam::CLSLAMParticleData, mrpt::hmtslam::CHMTSLAM, mrpt::hmtslam::CHMHMapNode, mrpt::hmtslam::CHMHMapArc, mrpt::hmtslam::CHierarchicalMHMap, mrpt::detectors::CDetectable3D, mrpt::detectors::CDetectable2D, mrpt::utils::TStereoCamera, mrpt::utils::TCamera, mrpt::utils::CTypeSelector, mrpt::utils::CStringList, mrpt::utils::CSimpleDatabase, mrpt::utils::CSimpleDatabaseTable, mrpt::utils::CPropertiesValuesList, mrpt::utils::CMHPropertiesValuesList, mrpt::utils::CMemoryChunk, mrpt::utils::CImage, mrpt::poses::CPoses3DSequence, mrpt::poses::CPoses2DSequence, mrpt::poses::CPosePDFSOG, mrpt::poses::CPosePDFParticles, mrpt::poses::CPosePDFGrid, mrpt::poses::CPosePDFGaussianInf, mrpt::poses::CPosePDFGaussian, mrpt::poses::CPose3DRotVec, mrpt::poses::CPose3DQuatPDFGaussianInf, mrpt::poses::CPose3DQuatPDFGaussian, mrpt::poses::CPose3DQuat, mrpt::poses::CPose3DPDFSOG, mrpt::poses::CPose3DPDFParticles, mrpt::poses::CPose3DPDFGaussianInf, mrpt::poses::CPose3DPDFGaussian, mrpt::poses::CPose3DInterpolator, mrpt::poses::CPose3D, mrpt::poses::CPose2DInterpolator, mrpt::poses::CPose2D, mrpt::poses::CPointPDFSOG, mrpt::poses::CPointPDFParticles, mrpt::poses::TSimple3DPoint, mrpt::poses::CPointPDFGaussian, mrpt::poses::CPoint3D, mrpt::poses::CPoint2DPDFGaussian, mrpt::poses::CPoint2D, mrpt::math::CSplineInterpolator1D, mrpt::math::CPolygon, mrpt::math::CMatrixD, mrpt::math::CMatrixB, and mrpt::math::CMatrix.
Referenced by mrpt::utils::CStream::WriteObject().
Friends And Related Function Documentation
◆ mrpt::utils::CStream
|
friend |
Definition at line 64 of file CParameterizedTrajectoryGenerator.h.
Member Data Documentation
◆ classCObject
|
staticinherited |
◆ classCParameterizedTrajectoryGenerator
|
static |
Definition at line 64 of file CParameterizedTrajectoryGenerator.h.
◆ classCSerializable
|
staticinherited |
Definition at line 42 of file CSerializable.h.
◆ COLLISION_BEHAVIOR
|
static |
Defines the behavior when there is an obstacle inside the robot shape right at the beginning of a PTG trajectory.
Default value: COLL_BEH_BACK_AWAY
Definition at line 295 of file CParameterizedTrajectoryGenerator.h.
Referenced by internal_TPObsDistancePostprocess().
◆ INVALID_PTG_PATH_INDEX
|
staticprotected |
Definition at line 316 of file CParameterizedTrajectoryGenerator.h.
Referenced by initTPObstacleSingle(), and updateNavDynamicState().
◆ m_alphaValuesCount
|
protected |
The number of discrete values for "alpha" between -PI and +PI.
Definition at line 309 of file CParameterizedTrajectoryGenerator.h.
Referenced by alpha2index(), index2alpha(), initClearanceDiagram(), initTPObstacles(), mrpt::nav::CPTG_Holo_Blend::internal_initialize(), internal_readFromStream(), internal_writeToStream(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::inverseMap_WS2TP(), loadDefaultParams(), loadFromConfigFile(), saveToConfigFile(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::simulateTrajectories(), updateClearance(), and updateNavDynamicState().
◆ m_clearance_decimated_paths
|
protected |
Number of paths for the decimated paths analysis of clearance.
Definition at line 312 of file CParameterizedTrajectoryGenerator.h.
Referenced by initClearanceDiagram(), internal_readFromStream(), internal_writeToStream(), loadDefaultParams(), loadFromConfigFile(), and saveToConfigFile().
◆ m_clearance_num_points
|
protected |
Number of steps for the piecewise-constant approximation of clearance from TPS distances [0,1] (Default=5)
- See also
- updateClearance()
Definition at line 311 of file CParameterizedTrajectoryGenerator.h.
Referenced by initClearanceDiagram(), internal_readFromStream(), internal_writeToStream(), loadDefaultParams(), loadFromConfigFile(), saveToConfigFile(), and updateClearance().
◆ m_is_initialized
|
protected |
Definition at line 318 of file CParameterizedTrajectoryGenerator.h.
Referenced by deinitialize(), initialize(), and isInitialized().
◆ m_nav_dyn_state
|
protected |
Updated before each nav step by.
Definition at line 313 of file CParameterizedTrajectoryGenerator.h.
Referenced by loadFromConfigFile(), saveToConfigFile(), and updateNavDynamicState().
◆ m_nav_dyn_state_target_k
|
protected |
Update in updateNavDynamicState(), contains the path index (k) for the target.
Definition at line 314 of file CParameterizedTrajectoryGenerator.h.
Referenced by initTPObstacleSingle(), and updateNavDynamicState().
◆ m_score_priority
|
protected |
Definition at line 310 of file CParameterizedTrajectoryGenerator.h.
Referenced by internal_readFromStream(), internal_writeToStream(), loadDefaultParams(), loadFromConfigFile(), and saveToConfigFile().
◆ OUTPUT_DEBUG_PATH_PREFIX
|
static |
The path used as defaul output in, for example, debugDumpInFiles. (Default="./reactivenav.logs/")
Definition at line 226 of file CParameterizedTrajectoryGenerator.h.
Referenced by debugDumpInFiles().
◆ refDistance
|
protected |
Definition at line 308 of file CParameterizedTrajectoryGenerator.h.
Referenced by evalClearanceSingleObstacle(), initTPObstacleSingle(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::internal_initialize(), internal_readFromStream(), internal_writeToStream(), mrpt::nav::CPTG_DiffDrive_CollisionGridBased::inverseMap_WS2TP(), loadDefaultParams(), loadFromConfigFile(), saveToConfigFile(), and mrpt::nav::CPTG_DiffDrive_CollisionGridBased::setRefDistance().